最近在做一个项目,主要用激光雷达传感器检测运动状态中的车辆外轮廓尺寸信息,调研了国内的几家做激光雷达的厂家,最终选择了傲视智绘HE系列激光雷达,主要参数:50Hz/0.25°。选择该款雷达的主要理由是体积小,探测能力强,精度高,尤其他们家的售后服务比较及时到位。
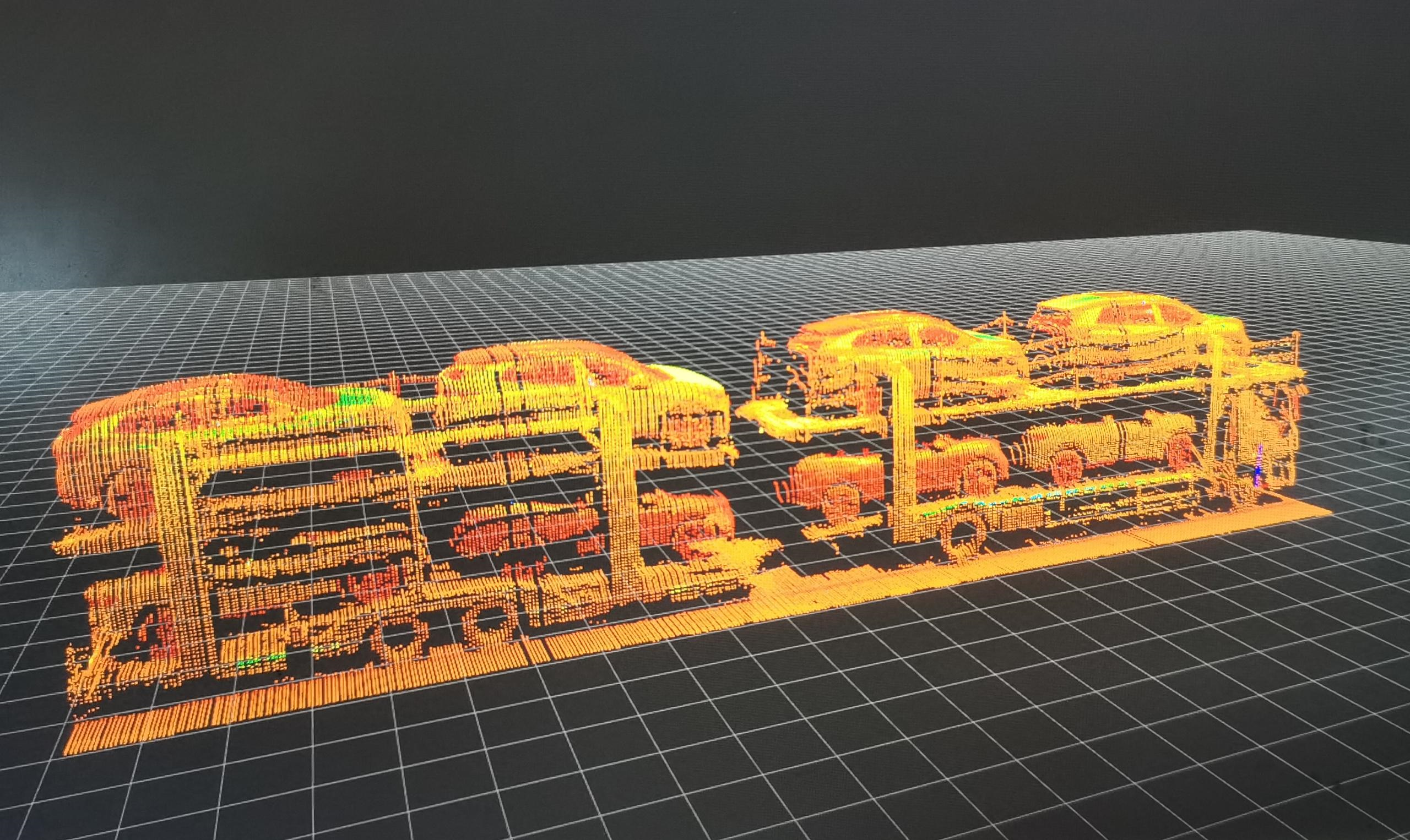
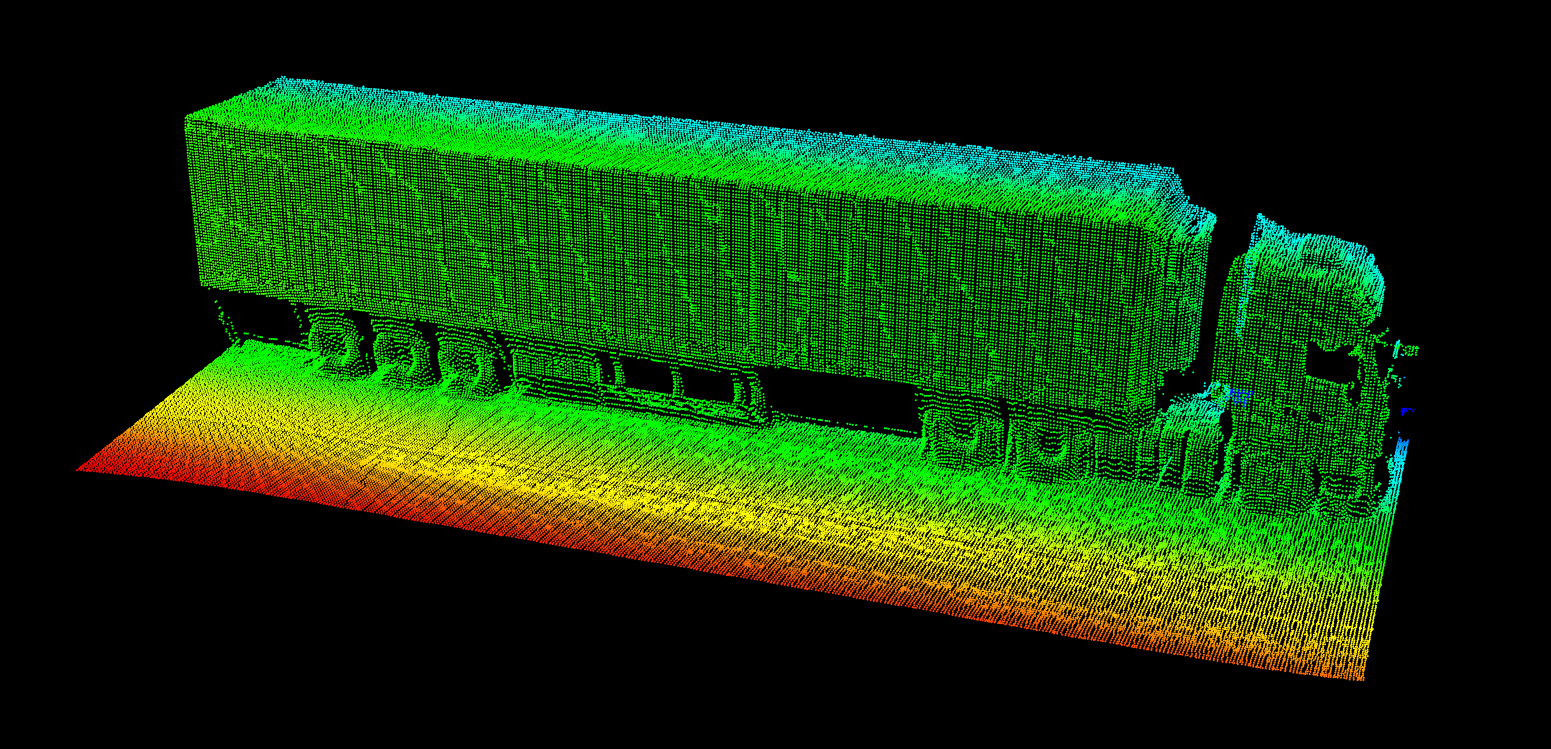
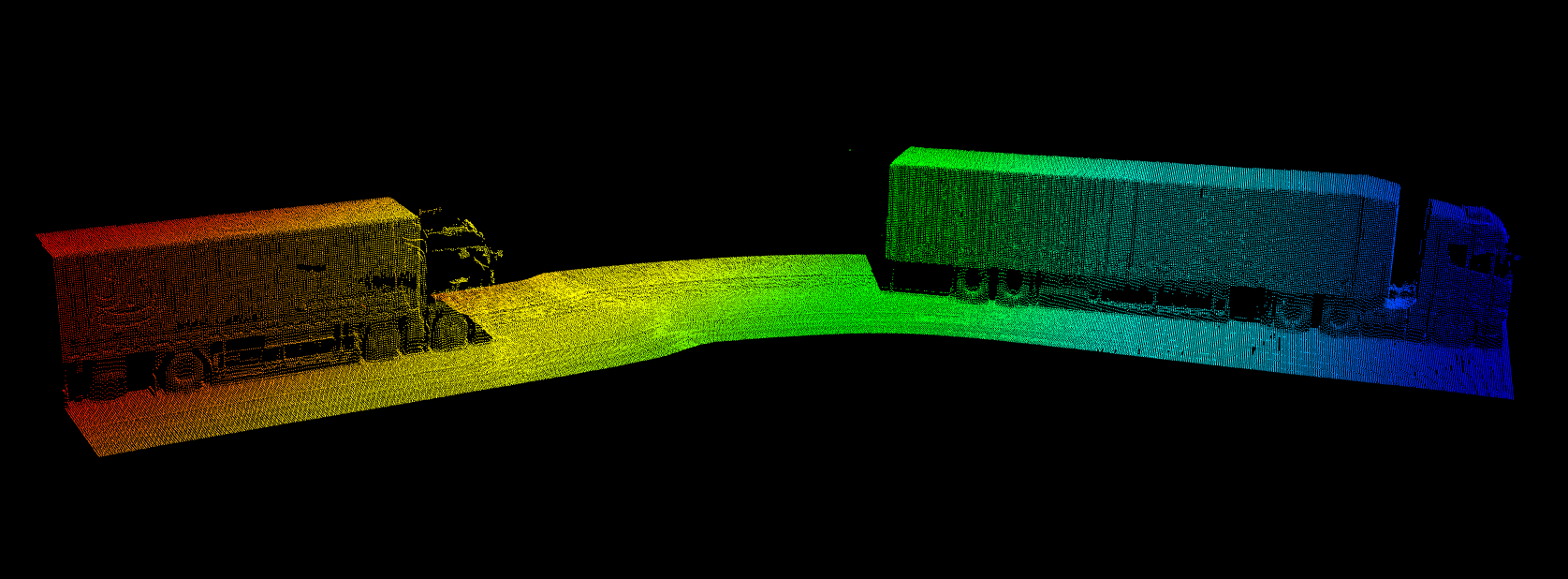
我们的项目主要用三台激光雷达,安装在龙门架或者翘臂上面,两台垂直道路扫描,一台平行车道扫描,实时检测通过的车辆速度,长,宽,高信息,同时也和称重系统连接,替代传统的地感线圈,给称提供触发信号。下图为通过激光雷达构建的三维轮廓点云图。
项目开发主要用C++开发,用到的技术库主要是OpenGL,PCL和一些同步算法,匹配算法。开发过程中,曾遇到了数据同步,融合,处理耗时等各种问题,还好经过一两个月的折腾,解决了所遇到的各种问题,实现了车辆外轮廓的测量,结果的计算基本在几十毫米内完成,做到实时性。
下一步进行车轴,轴型以及超限检测的研究。