本文系统地介绍类SPICE集成电路仿真器的实现原理,包括改进节点分析(MNA)、非线性器件建模、DC/AC分析、时域/(复)频域仿真以及涉及的数值方法。
基于介绍的原理,实现了SPICE-like仿真器:https://github.com/cassuto/CSIM
1 理论基础
任何集总参数电路都能依据基尔霍夫电流定律(KCL)、基尔霍夫电压定律(KVL)和支路约束方程建立模型并通过解析法或数值法求解,进而实现计算机辅助电路分析(CACA,Computer Aided Circuit Analysis)。
CACA核心:
1. 建立电路数学模型:
- a)
拓扑约束:利用图论分析电路,建立KCL、KVL方程。常见方法包括割集电压法、节点分析(NA, Nodal Analysis)法和C.W. Ho\(^{[1]}\)提出的改进节点分析(MNA, Modified Nodal Analysis)法等。UC Berkeley开发的SPICE即采用MNA方法\(^{[7]}\)。 - b)
元件约束:根据元件的物理特性和分析的目标建立VCR约束。(复)频域分析可使用s域模型或相量(正弦稳态)模型建立VCR约束;时域分析则可用微分代数方程(DAE)建立VCR约束,或先使用s域模型求解最后进行Laplace逆变换。
2. 求解数学模型。主要有解析法和数值法两种。并非所有模型都容易找到解析解。常采用数值方法,对于线性方程组,可用LU分解法等;对于非线性方程,需通过迭代法将其线性化。对于微分方程,常使用数值积分。
3. 分析模型。主要进行误差和灵敏度分析。
CACA把上述过程总结为一套算法,让计算机自动完成。
2 术语约定
在不同参考资料中,相关术语的定义各有差别。本文统一采用如下规定:
- 网络(Network):描述电路拓扑的无向图(带参考方向时为有向图),用\(G(V,E)\)表示;
- 网表(Netlist):网络的一个实例;
- 端子(Pin):元件的接线处;
- 端口(Port):一对端子构成一个端口;
- 节点(Node):连接两个或两个以上端子的交汇点;
- 支路(Branch):对于一个二端元件,若两个端子分别接在节点\(s\)和\(t\)上,则该二端元件构成一条支路\((s,t) \in E\);
- 关联(Associative):给定节点\(n\),如果存在支路\((s,t) \in E\)满足\(s=n\)或\(t=n\),就称该支路与节点\(n\)关联;
- 回路(Circuit):如果从节点\(n_0\)出发,能沿与之关联的支路\(b_0\)到达节点\(n_1\),再以\(n_1\)为起点,重复上述过程并最终返回节点\(n_0\),并且形成的访问序列\(<n_0,b_0,n_1,b_1,\cdots ,n_0>\)没有重复的节点,则该序列指出一个回路;
3 改进节点分析(MNA)前置内容
MNA是节点分析(NA)的增广,这里先介绍NA,如果您对此熟悉可以跳过本节。
3.1 NA方程的推导
我们从拓扑学角度推导NA方程。
将电路抽象为网络。首先为网络中各支路指定电流参考方向,使其成为有向网络,设其关联矩阵为:\(\mit{A}_{n \times b} = \begin{bmatrix} a_{jk} \end{bmatrix} = \begin{cases} 1, & \text{支路k参考电流从节点j流出}\\ -1, & \text{支路k参考电流从节点j流入} \\ 0, & \text{支路k与节点j无关联} \end{cases}\)
其中\(n\)为节点个数,\(b\)为支路个数。
设支路电压向量为\(\mit{U}=\begin{bmatrix} u_1, u_2, \cdots ,u_b \end{bmatrix} ^\mathrm{T}\);支路电流向量为\(\mit{I}=\begin{bmatrix} i_1, i_2, \cdots ,i_b \end{bmatrix} ^\mathrm{T}\)。
根据KCL定律\(^{[2]}\):
\]
其中\(\mit{I}_s=\begin{bmatrix} i_{s_1}, i_{s_2}, \cdots ,i_{s_n} \end{bmatrix} ^\mathrm{T}\)为注入电流,\(i_{s_j}>0\)表示电流注入节点\(j\),反之表示电流流出节点\(j\)。
设节点电压向量为\(\mit{U}_n=\begin{bmatrix} u_{n_1}, u_{n_2}, \cdots ,u_{n_n} \end{bmatrix} ^\mathrm{T}\)。在网络中任意选定一个节点作为参考节点,对于余下\((n-1)\)个节点,规定节点电压为该节点相对于参考节点的电位差。
根据KVL定律\(^{[2]}\):
\]
设支路导纳矩阵为:
\]
通过导纳描述支路约束方程:
\]
将式\((\ref{NA_KVL})\)代入式\((\ref{NA_BRAN})\),得到:
\]
再将式\((\ref{NA_KVL_BRAN})\)代入式\((\ref{NA_KCL})\)中,得到:
\]
令\(\mit{Y} = \mit{A}\mit{G}\mit{A}^\mathrm{T}\),最终得到节点分析方程:
\]
其中\(\mit{Y}\)称为节点导纳矩阵。
给定网表可计算节点导纳矩阵\(\mit{Y}\),也可由电流源支路确定\(\mit{I}_s\)(若无,置0)。最后只需解上述线性代数方程组,即可得出节点电压\(\mit{U_n}\)。
3.2 节点导纳矩阵的物理意义
上节已经推出节点导纳矩阵的表达式:
\sum\limits_{k=1}^{b} g_k \cdot (a_{1k}a_{1k}) & \cdots & \sum\limits_{k=1}^{b} g_k \cdot (a_{1k}a_{nk}) \\
\vdots & \ddots & \vdots \\
\sum\limits_{k=0}^{b} g_k \cdot (a_{nk}a_{1k}) & \cdots & \sum\limits_{k=0}^{b} g_k \cdot (a_{nk}a_{nk}) \end{bmatrix}\]
按照关联矩阵的定义,若支路\(k\)与节点\(i\)或\(j\)无关联,则\(a_{ik}a_{jk}=0\)。若支路\(k\)与节点\(i\)与\(j\)均有关联,则\(a_{ik}=\pm 1\)且\(a_{jk}=\mp 1\),此时有\(a_{ik}a_{jk}=\begin{cases} -1 & (i \ne j) \\ 1 & (i = j) \end{cases}\)。
由此可知,\(\sum\limits_{k=1}^{b} g_k \cdot (a_{ik}a_{jk}) =y_{ij} \space (i \ne j)\)的物理意义为:若节点\(i\)与节点\(j\)之间有直接关联的支路(\(i \ne j\)),则\(y_{ij}\)就是两节点\(i\)和\(j\)之间关联的所有支路的导纳之和取负数,否则\(y_{ij}=0\)。把它定义为互导\(y_{ij} \space (i \ne j)\)。
\(\sum\limits_{k=1}^{b} g_k \cdot (a_{ik}a_{ik})=y_{ii}\)的物理意义为:\(y_{ii}=\sum\limits_{j=1 \\ j \neq i}^{n} y_{ij}\),即所有与节点\(i\)直接关联的支路的导纳之和,把它定义为自导\(y_{ii}\)。
于是节点导纳矩阵就能简单表示为:
\]
下面以一个实例来说明这种表示的好处:
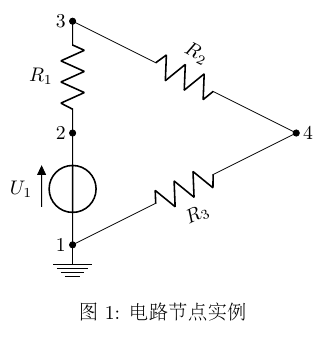
按照自导和互导的物理意义,就能直接知道节点1的自导\(y_{11}\)为\(R_3\)和\(U_1\)的电导之和,节点1到2的互导\(y_{12}\)为\(U_1\)的电导取负数,其它同理,可直接得出节点导纳矩阵如下:
\frac{1}{R_3}+G_{U_1} & -G_{U_1} & 0 & -\frac{1}{R_3} \\
-G_{U_1} & \frac{1}{R_1}+G_{U_1} & -\frac{1}{R_1} & 0\\
0 & -\frac{1}{R_1} & \frac{1}{R_1}+\frac{1}{R_2} & -\frac{1}{R_2} \\
-\frac{1}{R_3} & 0 & -\frac{1}{R_2} & \frac{1}{R_2}+\frac{1}{R_3}
\end{bmatrix} \]
需要注意\(y_{1,3}=y_{3,1}=0\),\(y_{2,4}=y_{4,2}=0\),因为节点1和3、2和4之间没有直接关联的支路。另外,因为U1是理想电压源,\(G_{U_1}=\infty\),因此这个电路用NA无法直接求解,这个例子揭示了NA的局限性。
4 改进节点分析(MNA)的原理
节点分析(NA)直接处理含无伴电压源(内阻为0)的支路时会遇到困难,因为这些支路的导纳为无穷大,方程无法求数值解。上文图1中的\(U_1\)就属于这种情况。
MNA解决NA局限性的思路很简单:对NA方程组进行增广。NA只分析节点电压,而MNA能同时分析支路电流,将两种状态变量混合在一起求解。
MNA混合方程如下:
\]
其中\(\mit{Y}\)是节点导纳矩阵;\(\mit{U}\)是节点电压向量;\(\mit{I}\)是节点电流向量,对应方程\(\mit{Y}\mit{U}=\mit{I}\)与NA无异。此外,\(\mit{J}\)是支路电流向量,\(\mit{B}\)、\(\mit{C}\)、\(\mit{D}\)、\(\mit{E}\)是新增加的方程的系数矩阵。
这些系数矩阵用“橡皮图章”法(Rubber Stamps)机械地生成\(^{[1]}\),实现电路分析的程序化。
4.1 方程生成算法
C.W. Ho提出的元件橡皮图章算法(Element Rubber Stamps)\(^{[1]}\)可以根据网表直接生成各子矩阵的值。算法初始时\(\mit{Y}=\mit{B}=\mit{C}=\mit{D}=\mit{I}=\mit{E}=0\)。遍历网表中所有元件,每遇到一个元件\(e\),就将该类型元件对应的贡献值\(c(e)\)加到相应的子矩阵,遍历结束时各子矩阵就有了正确的值,从而直接产生方程组。因为每种元件的贡献值是常量,可以将贡献值编制成表格,也称为“表格法”。
在稍后的推导中可以看到,算法“将贡献值加到对应子矩阵”的的理论依据是线性电路的叠加性。MNA本来只能处理线性电路,但是稍后可以看到如何利用线性化处理非线性电路。
方程生成算法可以描述为:
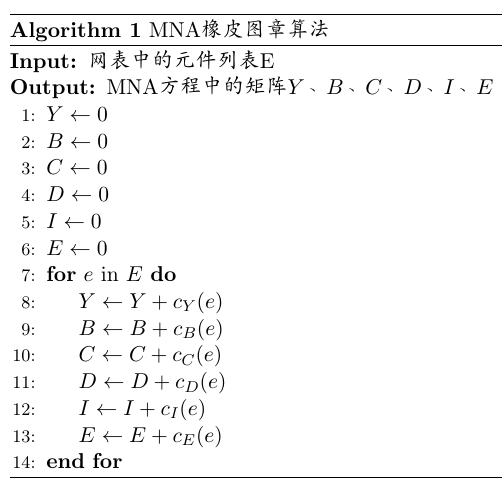
算法的关键是贡献值\(c_Y(e)\)、\(c_B(e)\)、\(c_C(e)\)、\(c_D(e)\)、\(c_I(e)\)、\(c_E(e)\)。
下面推导了一些常见一端口和二端口线性元件的贡献值。
4.2 常见一端口线性元件对Y、B、C、D、I、E的贡献
假设一端口元件所在支路为\(k\),电压与电流取关联参考方向\(s \rightarrow t\)。
4.2.1 阻抗元件
设元件导纳为\(y\),支路约束方程为:
y(u_s-u_t)=i_k \\
i_k=i_s=-i_t
\end{cases}
\]
其中\(i_k\)为元件所在支路电流。
整理上式得:
yu_s-yu_t=i_s \\
-yu_s+yu_t=i_t
\end{cases}
\]
对应MNA矩阵形式为:
\begin{bmatrix}
& \vdots & & \vdots \\
\cdots & {+y}_{(ss)} & \cdots & {-y}_{(st)} & \cdots \\
& \vdots & & \vdots \\
\cdots & {-y}_{(ts)} & \cdots & {+y}_{(tt)} & \cdots \\
& \vdots & & \vdots \\
\end{bmatrix}
\begin{bmatrix} \vdots \\ u_s \\ \vdots \\ u_t \\ \vdots \end{bmatrix} =
\begin{bmatrix} \vdots \\ i_s \\ \vdots \\ i_t \\ \vdots \end{bmatrix}
\label{equ:mna_y_comp}
\end{equation}
\]
如果多个阻抗元件并入支路,则支路的导纳就是它们之和。因此每当一个阻抗元件并入支路\(s \rightarrow t\)时,只需在MNA方程的分块矩阵Y中加上导纳:
\begin{bmatrix} \mit{y}'_{ss} & \mit{y}'_{st} \\ \mit{y}'_{ts} & \mit{y}'_{tt} \end{bmatrix} = \begin{bmatrix} \mit{y}_{ss}+y & \mit{y}_{st}-y \\ \mit{y}_{ts}-y & \mit{y}_{tt}+y \end{bmatrix}
\label{equ:admit_elem_contrib}
\end{equation}
\]
即加上贡献值:
\begin{bmatrix} \mit{c_Y(e)}_{ss} & \mit{c_Y(e)}_{st} \\ \mit{c_Y(e)}_{ts} & \mit{c_Y(e)}_{tt} \end{bmatrix} = \begin{bmatrix} +y & -y \\ -y & +y \end{bmatrix}
\label{equ:con_admit_elem_contrib}
\end{equation}
\]
4.2.2 独立电压源(VS)
设VS的电压值设定为\(e_s\)。支路约束方程为:
\]
其中\(i_k\)为VS所在支路的电流。
对应MNA矩阵形式为:
& & & & \vdots \\ \cdots & \cdots & \cdots & \cdots & 1_{(sk)} & \cdots \\
& & & & \vdots \\ \cdots & \cdots & \cdots & \cdots & {-1}_{(tk)} & \cdots \\
& & & & \vdots \\ \cdots & 1_{(ks)} & \cdots & {-1}_{(kt)} & \cdots & \cdots \\
& & & &\vdots
\end{bmatrix}
\begin{bmatrix} \vdots \\ u_s \\ \vdots \\ u_t \\ \vdots \\ i_k \\ \vdots \end{bmatrix} = \begin{bmatrix} \vdots \\ i_s \\ \vdots \\ i_t \\ \vdots \\ {e_s}_{(k)} \\ \vdots \end{bmatrix}
\]
如果多个电压源串在同一支路,则支路电压为它们之和,因此每当一个VS串入支路\(s \rightarrow t\)时,只需加上贡献值:
\begin{bmatrix} \mit{c_B(e)}_{sk} \\ \mit{c_B(e)}_{tk} \end{bmatrix} = \begin{bmatrix} 1 \\ -1 \end{bmatrix} \\
\begin{bmatrix} \mit{c_C(e)}_{ks} & \mit{c_C(e)}_{kt} \end{bmatrix} = \begin{bmatrix} 1 & -1 \end{bmatrix} \\
\mit{c_E(e)}_k=E_s
\label{equ:vs_contrib}
\end{equation}
\]
4.2.3 独立电流源(CS)
设CS电流值设定为\(i_k\),支路约束方程为:
\]
如果多个电流源并入支路,则支路总电流就是它们之和,因此每当一个CS并入支路\(s \rightarrow t\)时,只需加上贡献值:
\begin{bmatrix} \mit{c_I(e)}_s \\ \mit{c_I(e)}_j \end{bmatrix} = \begin{bmatrix} - i_k \\ + i_k \end{bmatrix}
\label{equ:cs_contrib}
\end{equation}
\]
上述这些例子其实反映了线性电路的叠加性。这就是为什么任何元件加入电路时都只需在MNA对应矩阵加上贡献值。
4.3 常见二端口线性元件对Y、B、C、D、I、E的贡献
假设元件的端口1所在支路为\(k\),电压与电流取关联参考方向\(s \rightarrow t\);端口2所在支路为\(c\),电压与电流取关联参考方向\(p \rightarrow q\)。
4.3.1 电压控制电压源(VCVS)
设VCVS电压放大倍数为\(\mu\),控制电压为\((u_p - u_q)\)。支路约束方程为:
\mu(u_p - u_q) = u_s - u_t \\
i_p = -i_q = 0 \\
i_s = -i_t = i_k \\
\end{cases}
\]
其中\(i_k\)为VCVS受控端口所在支路的电流。
对应MNA矩阵形式为:
& & & & \vdots \\
\cdots & \cdots & \cdots & \cdots & 1_{(sk)} & \cdots & \cdots & \cdots & \cdots \\
& & & & \vdots \\ \cdots & \cdots & \cdots & \cdots & {-1}_{(tk)} & \cdots & \cdots & \cdots & \cdots \\
& & & & \vdots \\ \cdots & 1_{(ks)} & \cdots & {-1}_{(kt)} & \cdots & {-\mu}_{(kp)} & \cdots & {+\mu}_{(kq)} & \cdots \\
& & & &\vdots
\end{bmatrix}
\begin{bmatrix} \vdots \\ u_s \\ \vdots \\ u_t \\ \vdots \\ u_p \\ \vdots \\ u_q \\ \vdots \\ i_k \\ \vdots \end{bmatrix} = \begin{bmatrix} \vdots \\ i_s \\ \vdots \\ i_t \\ \vdots \\ 0_{(k)} \\ \vdots \end{bmatrix}
\]
可知每当一个VCVS加入支路\(s \rightarrow t\)、\(p \rightarrow q\)时,贡献为:
\]
\]
\]
\]
4.3.2 电压控制电流源(VCCS)
设VCCS的转移电导为\(g\),控制电压为\((u_p - u_q)\)。支路约束方程为:
\]
对应MNA矩阵形式为:
& \vdots & & \vdots \\
\cdots & {+g}_{(sp)} & \cdots & {-g}_{(sq)} & \cdots \\
& \vdots & & \vdots \\
\cdots & {-g}_{(tp)} & \cdots & {+g}_{(tq)} & \cdots \\
& \vdots & & \vdots
\end{bmatrix}
\begin{bmatrix} \vdots \\ u_s \\ \vdots \\ u_t \\ \vdots \end{bmatrix} = \begin{bmatrix} \vdots \\ i_s \\ \vdots \\ i_t \\ \vdots \end{bmatrix}
\]
可知每当一个VCCS加入支路\(s \rightarrow t\)、\(p \rightarrow q\)时,贡献为:
\]
\]
4.3.3 电流控制电压源(CCVS)
设CCVS的转移电阻为\(r\),控制电流为\(i_c\),支路约束方程为:
r i_c=u_s-u_t \\
i_s=-i_t=i_k \\
u_p - u_q = 0 \\
i_p=-i_q=i_c
\end{cases}
\]
其中\(i_k\)为CCVS受控端口所在支路电流。
对应MNA矩阵形式为:
& & & & & & \vdots & \vdots \\
\cdots & \cdots & \cdots & \cdots & \cdots & \cdots & 1_{(sk)} & \cdots \\
& & & & & & \vdots & \vdots \\
\cdots & \cdots & \cdots & \cdots & \cdots & \cdots & {-1}_{(tk)} & \cdots \\
& & & & & & \vdots & \vdots \\
\cdots & \cdots & \cdots & \cdots & \cdots & \cdots & \cdots & 1_{(pc)} \\
& & & & & & \vdots & \vdots \\
\cdots & \cdots & \cdots & \cdots & \cdots & \cdots & \cdots & {-1}_{(qc)} \\
& & & & & & \vdots & \vdots \\
\cdots & 1_{(ks)} & \cdots & {-1}_{(kt)} & \cdots & {-r}_{(kc)} & \cdots & \cdots \\
& & & & & & \vdots & \vdots \\
\cdots & \cdots & 1_{(cp)} & \cdots & {-1}_{(cq)} & \cdots & \cdots & {0}_{(cc)} \\
& & & & & & \vdots & \vdots
\end{bmatrix}
\begin{bmatrix} \vdots \\ u_s \\ \vdots \\ u_t \\ \vdots \\ u_p \\ \vdots \\ u_q \\ \vdots \\ i_c \\ \vdots \\ i_k \\ \vdots \end{bmatrix} = \begin{bmatrix} \vdots \\ i_s \\ \vdots \\ i_t \\ \vdots \\ i_p \\ \vdots \\ i_q \\ \vdots \\ 0_{(k)} \\ \vdots \\ 0_{(c)} \\ \vdots \end{bmatrix}
\]
可知每当一个CCVS加入支路\(s \rightarrow t\)、\(p \rightarrow q\)时,贡献为:
\begin{bmatrix} \mit{c_B(e)}_{sk} \\ \mit{c_B(e)}_{tk} \end{bmatrix} = \begin{bmatrix} 1 \\ -1 \end{bmatrix} \\
\begin{bmatrix} \mit{c_B(e)}_{pc} \\ \mit{c_B(e)}_{qc} \end{bmatrix} = \begin{bmatrix} 1 \\ -1 \end{bmatrix} \\
\begin{bmatrix} \mit{c_C(e)}_{ks} & \mit{c_C(e)}_{kt} \end{bmatrix} = \begin{bmatrix} 1 & -1 \end{bmatrix} \\
\begin{bmatrix} \mit{c_C(e)}_{cp} & \mit{c_C(e)}_{cq} \end{bmatrix} = \begin{bmatrix} 1 & -1 \end{bmatrix} \\
\mit{c_D(e)}_{kc} = -r \\
\mit{c_D(e)}_{cc} = 0 \\
\begin{bmatrix} \mit{c_E(e)}_{k} \\ \mit{c_E(e)}_{c} \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \end{bmatrix}
\label{equ:ccvs_contrib}
\end{equation}
\]
4.3.4 电流控制电流源(CCCS)
设CCCS的电流放大倍数为\(\alpha\),控制电流为\(i_c\)。支路约束方程为:
i_s=-i_t=\alpha i_c \\
u_p-u_q=0 \\
i_p=-i_q=i_c \\
\end{cases}
\]
对应矩阵形式为:
& & \vdots \\
\cdots & \cdots & {+ \alpha}_{(sc)} & \cdots & \cdots & \cdots & \cdots \\
& & \vdots \\
\cdots & \cdots & {- \alpha}_{(tc)} & \cdots & \cdots & \cdots & \cdots \\
& & \vdots \\
\cdots & \cdots & {1}_{(pc)} & \cdots & \cdots & \cdots & \cdots \\
& & \vdots \\
\cdots & \cdots & {-1}_{(qc)} & \cdots & \cdots & \cdots & \cdots \\
& & \vdots \\
\cdots & 1_{(cp)} & \cdots & {-1}_{(cq)} & \cdots & 0_{(cc)} & \cdots \\
& & \vdots
\end{bmatrix}
\begin{bmatrix} \vdots \\ u_p \\ \vdots \\ u_q \\ \vdots \\ i_c \\ \vdots \end{bmatrix} =
\begin{bmatrix} \vdots \\ i_s \\ \vdots \\ i_t \\ \vdots \\ i_p \\ \vdots \\ i_q \\ \vdots \\ 0_{(c)} \\ \vdots \end{bmatrix}
\]
可知每当一个CCCS加入支路\(s \rightarrow t\)、\(p \rightarrow q\)时,贡献为:
\]
\]
\]
\]
\]
5 稀疏矩阵计算
对于线性电路,按照上述方法可以建立MNA方程:
\]
直接采用高斯列主元素消元法、LU分解法、雅各比迭代法等都能求解上述方程,具体参考教科书[3]。
但是,求解稠密矩阵方程需要\(O(n^3)\)的时间。如果观察到电路对应的系数矩阵\(\mit{A}\)是稀疏矩阵,就可以使用更优化的算法,因为而稀疏矩阵中存在大量零元素,利用稀疏矩阵算法,存储和计算时都可以跳过大量零元素,从而使算法所需的时间和空间大幅减少。
6 非线性元件的分析
MNA可以方便地分析线性电路,但无法直接处理非线性电路。
幸运的是,如果利用迭代法将非线性元件线性化,使每一步迭代都能用等效的线性元件替代,就能利用MNA分析和求解非线性电路。SPICE就采用这种方法\(^{[7]}\)。
6.1 牛顿-拉夫逊法求解非线性MNA方程
牛顿-拉夫逊法(Newton-Ralfsnn's method)是最常用求解非线性方程近似根的算法。
牛顿-拉夫逊法通过如下迭代格式计算非线性方程\(f(\mit{x}) = \mit{0}\)的近似根\(\mit{x}\):
\]
根据MNA方程\((\ref{MNA})\),设
\]
根据式\((\ref{equ:newtown_fx})\):
\]
这其中涉及的雅克比矩阵有:
\]
\]
利用雅可比矩阵将式\((\ref{equ:newtown_fx})\)改写为:
\]
再将式\((\ref{equ:fMNA})\)代入,整理可得迭代格式:
\]
即\(\mit{A}'(\mit{x}^{(k)}) \cdot \mit{x}^{(k+1)}=\mit{z}'(\mit{x}^{(k)})\),可见迭代格式与线性代数方程组形式保持一致。给定初值\(\mit{x}^{(0)}\),计算\(\mit{A}'(\mit{x}^{(0)})\)、\(\mit{z}'(\mit{x}^{(0)})\),然后求解线性代数方程组,得到\(\mit{x}^{(1)}\),再将\(\mit{x}^{(1)}\)作为新的初值,重复上述过程,生成迭代序列\(\{\mit{x}^{(k)}\}\),直到\(\|\mit{x}^{(k+1)} - \mit{x}^{(k)}\|\)小于设定的误差限时,可认为迭代收敛,取近似根\(\tilde{\mit{x}} = \mit{x}^{(k+1)}\)。
牛顿-拉夫逊迭代的本质是将非线性问题分成若干线性问题,这就启发我们用该方法实现元件的线性化,从而允许用MNA分析非线性元件。
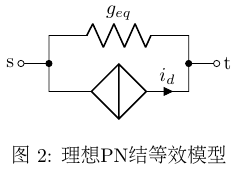
6.2 理想PN结模型
理论上任何非线性元件都可以用动态电压源或电流源等效代替。为了便于应用MNA,这里使用动态电流源代替。
设理想PN结位于支路\(s \rightarrow t\)上,理想PN结电流的近似方程为:
\]
其中\(I_0\)为反向饱和电流,\(U_T\)为温度电压当量,这两个参数都是由物理特性决定的。
将PN结作为动态电流源注入支路\(s \rightarrow t\),根据独立电流源支路的结论\((\ref{equ:cs_contrib})\),有:
\]
代入牛顿-拉夫逊迭格式\((\ref{equ:mna_newtown_format})\):
& \vdots & & \vdots \\
\cdots & {\left(\mit{Y}_{ss}+{\frac{I_0}{U_T}e^{\frac{{u_s}^{(k)}-{u_t}^{(k)}}{U_T}}}\right)}_{(ss)} & \cdots & {\left(\mit{Y}_{st}-{\frac{I_0}{U_T}e^{\frac{{u_s}^{(k)}-{u_t}^{(k)}}{U_T}}}\right)}_{(st)} & \cdots \\
& \vdots & & \vdots \\
\cdots & {\left(\mit{Y}_{ts}-{\frac{I_0}{U_T}e^{\frac{{u_s}^{(k)}-{u_t}^{(k)}}{U_T}}}\right)}_{(ts)} & \cdots & {\left(\mit{Y}_{tt}+{\frac{I_0}{U_T}e^{\frac{{u_s}^{(k)}-{u_t}^{(k)}}{U_T}}}\right)}_{(tt)} & \cdots \\
& \vdots & & \vdots
\end{bmatrix} = \mit{A}' \end{aligned} \label{equ:pn_newtown_left} \end{equation} \]
对比之前推出的阻抗元件支路的结论(式\(\ref{equ:mna_y_comp}\)),可以认为\((\ref{equ:pn_newtown_left})\)描述的是等效电阻,其电导\({g_d}^{(k)}\)随迭代次数\(k\)动态变化,然而在本轮迭代内是不变的,可视作线性元件:
\]
再考虑式\((\ref{equ:mna_newtown_format})\),右边式子可展开为:
\]
其中:
\]
\]
从物理意义上看,式\((\ref{equ:PN_i_d})\)描述的是动态电流源\(i_d\)与动态电阻\(g_{eq}\)并联,如图2所示,这样就实现了元件的线性化,每次迭代都可以用MNA分析了。
至此式\((\ref{equ:mna_newtown_format})\)左右两边都已确定,得到MNA方程组:
\]
每当一个理想PN结加入支路\(s \rightarrow t\)时,只需对子矩阵作如下更新:
\begin{bmatrix} & \vdots & & \vdots \\
\cdots & {\left(\mit{Y}_{ss}+{g_d}^{(k)}\right)}_{(ss)} & \cdots & {\left(\mit{Y}_{st}-{g_d}^{(k)}\right)}_{(st)} & \cdots \\
& \vdots & & \vdots \\
\cdots & {\left(\mit{Y}_{ts}-{g_d}^{(k)}\right)}_{(ts)} & \cdots & {\left(\mit{Y}_{tt}+{g_d}^{(k)}\right)}_{(tt)} & \cdots \\
& \vdots & & \vdots \end{bmatrix} \]
\]
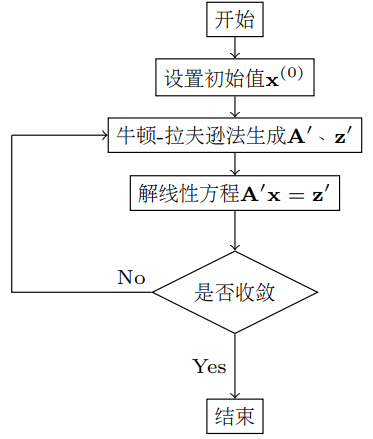
值得注意的是整个求解过程是迭代进行的,每轮迭代都要重新计算等效电路的参数并重新求解MNA,即:
给定初值\(\mit{x}^{(0)}\)(这其中包含PN结两端的节点电压\({u_s}^{(0)}\)、\({u_t}^{(0)}\)),代入式\((\ref{equ:pn_newtown_left})\)和式\((\ref{equ:pn_newtown_right})\)可得线性代数方程组\((\ref{equ:new_rn_mna})\),解线性代数方程组可以得到\(\mit{x}^{(1)}\),再将\(\mit{x}^{(1)}\)作为新的初值,如此迭代。当相邻两次迭代获得的解\(\mit{x}^{(k+1)}\)与\(\mit{x}^{(k)}\)满足\(\| \mit{x}^{(k+1)}-\mit{x}^{(k)} \| \lt \epsilon\)时,就可认为迭代收敛,可以取近似解\(\mit{x}^{(k+1)}\)。
下面给出了非线性电路分析的算法流程。
6.2.1 收敛性问题
在PN结特性方程的牛顿-拉夫逊迭代中,存在如下图所示的异常情况:

图中第\(k+1\)步迭代时,由于指数函数的迅猛增长,\(i_d^{(k+1)}\)超出机器数所能表示的范围,产生上溢,使得迭代无法进行下去。
考虑到实际电路中不可能出现如此大的电流(双精度浮点数最大值约为\(10^{308}\));另外在结电流方程中,当\(y\)急剧增长时,\(x\)的变化范围却很小。因此可以将PN结电压限制在较小范围内,以避免数值溢出\(^{[6]}\)。
PN结临界电压是V-I曲线中曲率半径最小的点,当PN结电压大于临界电压时,结电流开始急剧增加,因此可用PN结临界电压\(U_{th}\)作为阈值的参考。
\]
结电压限制算法一般基于经验来构造。一种最简单的阈值限制算法是\(U'_d = max(U_d, 10U_{th})\)。
这种算法将结电压限制在\(10U_{th}\)以下,但限制后的V-I曲线在\(U_d=10U_{th}\)处的导数不存在,大于\(10U_{th}\)后导数为0,由此造成不收敛。
SPICE中的限制算法\(^{[7]}\)要复杂得多,当\(U_d > U_{th}\)时,采用以电流\(I_d\)为变量的迭代;当\(U_d \le U_{th}\)时,采用正常的迭代格式。
6.3 收敛条件
对于MNA方程中的节点电压\(U\)和支路电流\(J\),SPICE采用独立的收敛条件。设\(RELTOL\)为相对误差限,\(ABSTOL\)为绝对误差限。当:
\]
并且,当\(|J^{(k+1)} _b- J^{(k)}_b| \le RELTOL \cdot J_{b,max} + ABSTOL\)时,认为迭代收敛。
其中\(U_{n,max}=max(|U^{(k+1)}_n|, |U^{(k)}_n|)\);\(U^{(k+1)}, U^{(k)}\)为相邻两次迭代的结果。\(J_b\)同理。
7 直流扫描分析(DC Sweep)
直流分析用于求静态工作点,而直流扫描分析遍历参数,输出各参数下电路的静态工作点。
7.1 特殊情形
直流分析反映的是输入为直流(即频率\(\omega=0\))时的状态,需要特殊处理动态元件。
电容在直流下的容抗为$ \lim \limits_{\omega \rightarrow 0} \frac{1}{j \omega C} = \infty $,显然直流分析时电容应视为两端开路。
电感在直流下的感抗为$ \lim \limits_{\omega \rightarrow 0} j \omega L = 0 $,显然直流分析时应视为两端短路。
此外所有作为信号源的电压源视为短路、作为信号源的电流源视为开路。
7.2 直流分析的过程
设目标参数\(p\),扫描范围\([p_{min}, p_{max}]\),扫描步长\(s\)。线性扫描共需要\(\frac{p_{max}-p_{min}}{s}\)次方程求解,每次将目标参数设定为\(p(n)=p_{min}+ns\),通过改进节点分析(MNA)建立的方程解出对应的节点电压\(U(n)\)。这样\(U(n)\)就形成了直流扫描分析的结果。
实用中,有时需要使用对数步进来扫描。
8 交流扫描分析(AC Sweep)
AC Sweep分析是正弦稳态电路在频域上的小信号分析。输入变量是正弦频率\(\omega\),输出变量是电路中各节点电压的频率响应(幅度和相位)。
交流分析采用相量法,电压电流都采用相量表示,仍然利用MNA求解,只不过MNA中各矩阵都定义在复数域上。
8.1 电容的相量模型
理想电容在正弦稳态电路中的VCR表示为
\]
每当一个理想电容加入支路\(s \rightarrow t\)时,只需对MNA的子矩阵的值作如下更新:
\begin{bmatrix} \mit{y}_{ss} + j \omega C & \mit{y}_{st} - j \omega C \\ \mit{y}_{ts} - j \omega C & \mit{y}_{tt} + j \omega C \end{bmatrix} \]
8.2 电感的相量模型
类似地,理想电感在正弦稳态电路中的VCR表示为
\]
每当一个电感加入支路\(s \rightarrow t\)时,只需对MNA的子矩阵的值作如下更新:
\begin{bmatrix} \mit{y}_{ss} + \frac{1}{j\omega L} & \mit{y}_{st} - \frac{1}{j\omega L} \\ \mit{y}_{ts} - \frac{1}{j\omega L} & \mit{y}_{tt} + \frac{1}{j\omega L} \end{bmatrix} \]
8.3 交流分析的过程
交流分析非常重要的假设是小信号。在小信号模型中,非线性元件可以在静态工作点处线性化,例如PN结可通过动态电阻\(g_d(u)\)等效。因此在进行交流分析之前,先进行直流分析,确定电路静态工作点。静态工作点确定,式\((\ref{equ:mna_newtown_format})\)中所有雅克比矩阵的值也都确定。这样在交流分析时,不必迭代,而是将其视作线性方程来处理。
9 复频域分析(s域)
对电路的微分方程进行Laplace变换可以得到s域上的代数方程,这些代数方程可以用与上一节AC分析相同的方法建立和求解。事实上,上节所述的相量模型可以看作\(s = j\omega\)的特殊情况,这也反映了频域和复频域的关系。
s域的MNA混合方程变为:
\]
9.1 Laplace变换
给定时域激励信号f(t),可通过Laplace变换得到复频域上的激励\(F(s)=\mathscr{L}[f(t)]\),将F(s)代入激励源模型中,求解MNA方程即可得到节点电压和分支电流的频域响应\(\begin{bmatrix} \mit{U(s)} & \mit{J(s)} \end{bmatrix}^{T}\)。
9.2 Laplace逆变换
对于上面得到的频域响应,可通过逆变换得到时域响应\(\begin{bmatrix}\mathscr{L}^{-1}[\mit{U(s)}] & \mathscr{L}^{-1}[\mit{J(s)}]\end{bmatrix}^{T}\)。
10 瞬态分析(时域分析)
上节已经给出了从复频域变换到时域的分析方法,下面介绍直接在时域进行分析的方法。
时域上理想电容和电感的VCR为常微分方程:
\]
\]
计算机无法直接处理连续时间系统。可以将时间离散化,然后利用数值方法求解。
10.1 线性多步:隐式GEAR法
对于电容或电感特性方程中所出现的形如\(f(x,t) = \frac{dx}{dt}\)的常微分方程,可通过积分\(x = \int f(x,t) dt\)来求解。
根据黎曼积分的定义,连续时间域上的积分\(x = \int f(x,t) dt\)可通过离散时间域上的累积来近似:
\]
其中\(h_n=t_{n+1}-t_n\)称为第\(n\)步的步长。
将式\((\ref{equ:num_int})\)写成迭代格式:
\]
这是一阶显式单步法。单步法的收敛性可参考资料\(^{[3]90-92}\)。为了获得更精确的解,这里采用线性多步法。线性多步法是前\(p\)步解的线性组合,单步法正是线性多步法的特例。
\]
其中\(p\)是步数。\(a_i\)、\(b_i\)是常系数。
利用泰勒展开构造线性多步法\(^{[5]}\),\(a_i\)、\(b_i\)应满足:
\end{cases} \label{equ:lin_multi_step_ab} \end{equation} \]
选取一些特殊的\(p\)、\(a_i\)、\(b_i\)值,就能构造出不同的迭代方法。当\(b_{-1} \ne 0\)时为隐式方法,当\(b_{-1} = 0\)时为显式方法。对于隐式GEAR:
\]
给定阶数\(k=1,2,\cdots\),联立式\((\ref{equ:gear_pb})\)与式\((\ref{equ:lin_multi_step_ab})\)可以解出系数\(a_i\)、\(b_i\)。从结果来看,一阶隐式GEAR就是隐式欧拉法(Implicit Euler's method)。4阶隐式GEAR迭代格式如下:
\]
10.2 线性多步法中的迭代
在线性多步法迭代格式\((\ref{equ:multi_step_format})\)中,式子左侧为待求的量\(x_{n+1}\),而式子右侧也依赖于待求量\(x_{n+1}\),因此待求量无法直接计算。解决办法是解方程,设方程\(f(x_{n+1}) = x_{n+1} - \sum_{i=0}^{p}a_i x_{n-i} + h_n\sum_{i=-1}^{p}b_i f(x_{n-i},t_{n-i}) = 0\),则只需通过迭代解出该方程的根\(x_{n+1}\)即可。迭代格式为:
\]
迭代到\(\|x_{n+1}^{m+1}-x_{n+1}^{m}\|\)小于给定误差限时,可以取\(x_{n+1}=x_{n+1}^{m+1}\)。
10.3 预报-校正法
从上节可以看出,每步线性迭代中又包含若干\(x_{n+1}^{m+1}=g(x_{n+1}^{m})\)这样的迭代。初值\(x_{n+1}^0\)的选取将直接影响到迭代次数,因此初值的选取十分重要。相比于随机给定一个初值,通过预报器预测的初值可能更接近真实值,再进行线性多步迭代时,所需迭代次数将减少。
这里采用显式欧拉法实现预报器,预报值\(x_{n+1}^{0}\)计算为
\]
10.4 自适应步长控制算法
瞬态分析中,如果时间步长\(h_n\)选取过大会造成局部截断误差偏大,甚至得出完全错误的结果;而如果步长选取太小则会使得计算量增加。手工选取步长非常繁琐,而且固定步长在某些区间内往往不是最优,因此一般采用变步长算法。
\(h_n\)的选取应使得第\(n\)步的局部截断误差\(\xi_{L}^{(n+1)} = |x(t_{n+1}) - x_{n+1}|\)满足:
\]
其中\(\xi\)是设定的绝对误差限;\(\xi_r\)是设定的相对误差限。一般来说局部截断误差无法精确计算,只能通过Milne公式估计。
自适应步长控制中,先设定一个足够小的初始步长\(h_0\),每进行一次迭代,就计算出本次迭代的局部截断误差\(\xi_{L}^{(n+1)}\),再通过式\((\ref{equ:adpt_step})\)判定步长的好坏:
- 若\(q \gt 1\),则说明局部截断误差大于设定的误差限,步长偏大;
- 若\(q \lt 1\),则说明局部截断误差已经小于设定误差限,若q远小于1则说明步长过小。
根据\(q\)对步长进行动态调整:
\]
其中\(k\)是线性多步法的阶数。
假设当前仿真时间为\(t_{n+1}\),首先利用线性多步法求出解\(x_{n+1}\),再估计局部截断误差\(\xi_{L}^{(n+1)}\),按上式计算新步长\(h'_{n+1}\),若\(h'_{n+1}<h_{n+1}\),则说明局部截断误差过大,此时仿真时间不向前推进,而是按新步长重新计算当前时间的解\(x_{n+1}\),重复上述过程;反之则说明局部截断误差已经满足要求,仿真时间可以推进到\(t_{n+2}\),令\(h_{n+2}=h'_{n+1}\),结束本次步长调整。
下图为瞬态仿真实例:
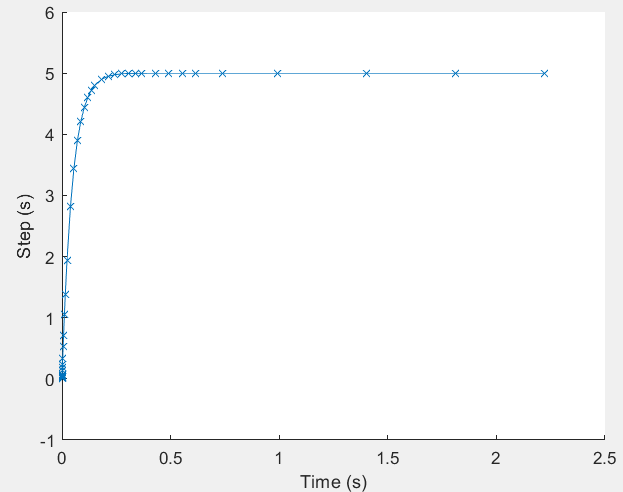
图中显示了步长的自适应调整,时间轴是均匀的,当信号变化接近线性时数据点比较稀疏,反之则比较稠密。
算法能保证每步迭代局部截断误差的估计值不超出规定的误差限,然而,每次调整步长都要重新计算线性方程组,对于信号快速变化的电路(例如开关电路),步长可能会频繁振荡,从而使仿真器将大量时间花费在寻找合适的步长上。因此,数字部分需要不同于模拟部分的专用算法来仿真。
10.5 常见储能元件的时域模型
10.5.1 电容的时域模型
电容的时域特性描述为:
\]
利用线性多步法\((\ref{equ:multi_step_format})\)得到迭代格式:
\]
将上式展开并移项(\(b_{-1} \ne 0\)),可得
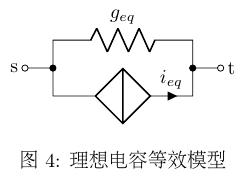
& = {g_{eq}}^{(n)} u_{n+1} + {i_{eq}}^{(n)} \end{aligned} \]
其中:
{i_{eq}}^{(n)} = -\sum_{i=0}^{p} \frac{a_i C}{b_{-1}h_n} u_{n-i} - \sum_{i=0}^{p} \frac{b_i}{b_{-1}} i_{n-i} \end{cases} \]
\(g_{eq}\)从物理上可解释为等效电导,\(i_{eq}\)从物理上可解释为等效电流源,于是得到了电容的等效线性化模型,如图4所示。
根据之前推出的阻抗元件支路对MNA各子矩阵的贡献(式\(\ref{equ:admit_elem_contrib}\))和独立电流源支路对MNA各子矩阵贡献值(式\(\ref{equ:cs_contrib}\))可知对应MNA方程为:
\begin{bmatrix} {u_s}^{(n+1)} \\ {u_t}^{(n+1)} \end{bmatrix} =
\begin{bmatrix} -{i_{eq}}^{(n)} \\ +{i_{eq}}^{(n)} \end{bmatrix} \]
因此可知每当一个电容加入支路\(s \rightarrow t\)时,只需对MNA各子矩阵作如下更新:
\begin{bmatrix} \mit{Y}_{ss} + {g_{eq}}^{(i)} & \mit{Y}_{st} - {g_{eq}}^{(i)} \\ \mit{Y}_{ts} - {g_{eq}}^{(i)} & \mit{Y}_{tt} + {g_{eq}}^{(i)} \end{bmatrix} \]
\]
同时应在程序中应设置标记,指出参数\({g_{eq}}^{(n)}\)和\({i_{eq}}^{(n)}\)是需要迭代计算的。给定步长\(h_n\),初值\(u_0={u_s}^{(0)}-{u_t}^{(0)}\),根据上式生成MNA方程,可解出节点电压\({u_s}^{(1)}\)、\({u_t}^{(1)}\),以此类推。
10.5.2 电感的时域模型
电感的时域特性描述为:
\]
利用线性多步法\((\ref{equ:multi_step_format})\)得到迭代格式:
\]
整理并移项(\(b_{-1} \ne 0\)),可得
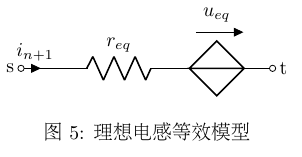
& = {r_{eq}}^{(n)}i_{n+1} + {u_{eq}}^{(n)} \end{aligned} \]
其中:
{u_{eq}}^{(n)} = -\sum_{i=0}^{p} \frac{a_iL}{b_{-1}h_n} i_{n-i} - \sum_{i=0}^{p} \frac{b_i}{b_{-1}} u_{n-i} \end{cases} \]
从物理意义上看,电感可等效为动态电阻\(r_{eq}\)与独立电压源\(u_{eq}\)串联,如图5所示。
根据之前推出的独立电压源的贡献值(式\(\ref{equ:vs_contrib}\))和电流控制电压源支路对MNA各子矩阵贡献值(式\(\ref{equ:ccvs_contrib}\))可知对应MNA方程为:
\begin{bmatrix} {u_s}^{(n+1)} \\ {u_t}^{(n+1)} \\ {i_k}^{(n+1)} \end{bmatrix} =
\begin{bmatrix} \vdots \\ \vdots \\ {u_{eq}}^{(n)} \end{bmatrix} \]
因此每当一个电感加入支路\(s \rightarrow t\)时,只需对MNA各子矩阵作如下更新:
\begin{bmatrix} \mit{B}'_{sk} \\ \mit{B}'_{tk} \end{bmatrix} = \begin{bmatrix} 1 \\ -1 \end{bmatrix} \\
\begin{bmatrix} \mit{C}'_{ks} & \mit{C}'_{kt} \end{bmatrix} = \begin{bmatrix} 1 & -1 \end{bmatrix} \\
\mit{D}'_{kk} = -{r_{eq}}^{(n)} \\
\mit{E}'_k={u_{eq}}^{(n)} \\
\end{equation}
\]
同时应在程序中应设置标记,指出参数\({r_{eq}}^{(n)}\)和\({u_{eq}}^{(n)}\)是需要迭代计算的。
10.6 时域分析总流程
- 1 初始化:建立MNA方程。设置当前时间\(t=0\),设置积分步\(s\)、阶数\(ord\)为初值
- 2 用\(s\)、\(ord\)计算GEAR系数
- 3 解MNA方程(流程图见6.2)
- 4 更新时间\(t'=t+s\)
- 5 动态调整积分步\(s\)、阶数\(ord\)
- 6 判断终止条件,不终止则循环执行 2
11 程序实现
详见文章开头给出的github链接。
参考资料
[1] C.W. Ho; Ruehli, A.; Brennan, P. The modified nodal approach to network analysis[J]. IEEE, doi:10.1109/tcs.1975.1084079, 1975: 0–509.
[2] 邱关源. 电路[M]. 第5版, 高等教育出版社, 2006: 391-392.
[3] 李建良等. 计算机数值方法[M]. 东南大学出版社, 2009.
[5] Timothy Sauer. Numerical Analysis[M]. 2nd Edition, George Masonry University, 2011: 336-339.
[6] Thomas L. Quarles. Analysis of performance and convergence issues for circuit simulation[R], University of California, Berkeley Technical Report No. UCB/ERL M89/42, 1989: 30-31.
[7] L. W. Nagel. SPICE2: A Computer Program to Simulate Semiconductor Circuits[R]. University of California, Berkeley Technical Report No. UCB/ERL M520, 1975: 138-142