1. 激光雷达的定义
激光雷达是工作在光波频段的雷达,它利用光波频段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信号相比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)等信息,实现对目标的探测、跟踪和识别。
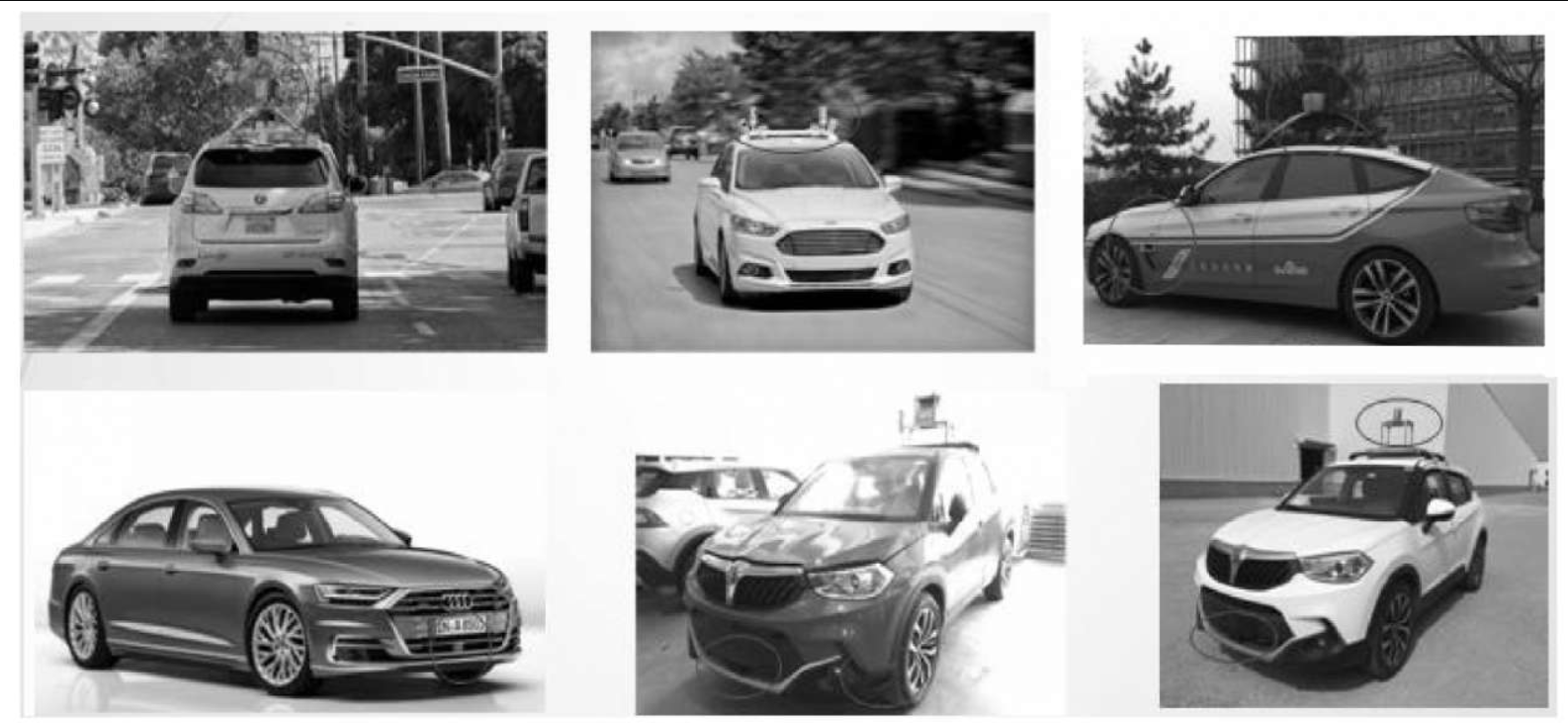
激光雷达根据安装位置的不同,分为两大类。一类安装在智能网联汽车或无人驾驶汽车的四周,另一类安装在智能网联汽车或无人驾驶汽车的车顶,如图2-33所示。安装在智能网联汽车或无人驾驶汽车四周的激光雷达,其激光线束一般小于8,常见的有单线束激光雷达和四线束激光雷达,适用于L3级以下;安装在智能网联汽车或无人驾驶汽车车顶的激光雷达,其激光线束一般不小于16,常见的有16/32/64线束激光雷达,适用于L3级以上,L5级甚至会使用128线束激光雷达。少线束激光雷达主要用于智能网联汽车的先进驾驶辅助系统,多线束激光雷达主要用于制作无人驾驶汽车的高精度地图,并进行道路和车辆的识别等。
2. 激光雷达的特点
激光雷达具有以下优点。
(1)探测范围广。探测距离可达300m以上。
(2)分辨率高。激光雷达可以获得极高的距离、速度和角度分辨率。通常激光雷达的距离分辨率可达0.1m;速度分辨率能达到10m/s以内;角度分辨率不低于0.1mard,也就是说可以分辨3km距离内相距0.3m的两个目标,并可同时跟踪多个目标。
(3)信息量丰富。可直接获取探测目标的距离、角度、反射强度、速度等信息,生成目标多维度图像。
(4)可全天候工作。激光主动探测,不依赖于外界光照条件或目标本身的辐射特性,它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。
激光雷达具有以下缺点。
(1)与毫米波雷达相比,产品体积大,成本高。
(2)不能识别交通标志和交通信号灯。
3. 激光雷达系统的组成
智能网联汽车激光雷达系统由收发天线、收发前端、信号处理模块、汽车控制装置和报警模块组成,如图2-34所示
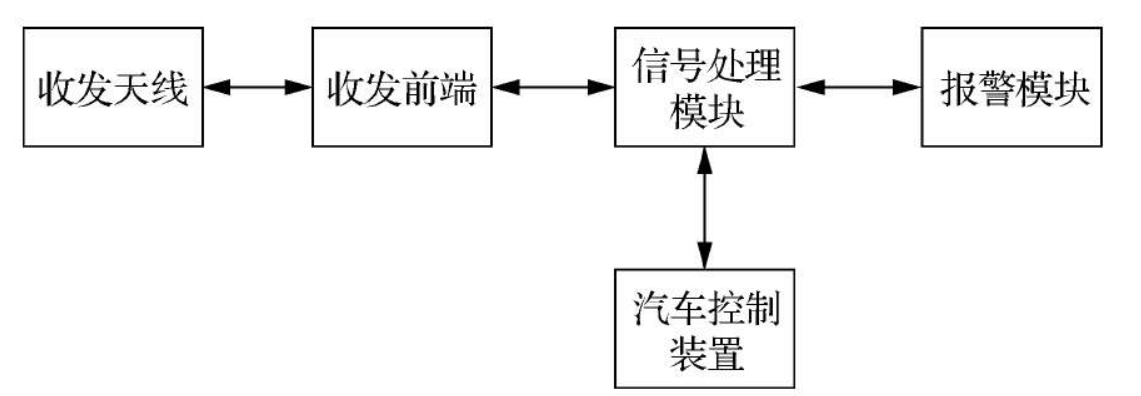
(1)收发天线。对于少线束激光雷达,收发天线可安装于车辆保险杠内,向车辆前方发出发射信号,并接收反射信号。
(2)收发前端。收发前端是雷达系统的核心部件,负责信号调制、射频信号的发射接收及接收信号解调。
(3)信号处理模块。信号处理模块自动分析、计算出与前方车辆的距离和相对速度,并且防止转弯时错误测量临近车道车辆的情况发生。
(4)汽车控制装置。汽车控制装置是控制汽车的自动操作系统,能够自动减速或紧急制动。通过限制发动机输出转矩、调节制动力及变速器挡位,控制汽车的行驶速度。
(5)报警模块。根据设定的安全车距和报警距离,以适当的方式给驾驶员报警,保障汽车安全行驶。
4. 激光雷达的测距原理
激光雷达的测距原理是通过测算激光发射信号与激光回波信号的往返时间,从而计算出目标的距离。首先,激光雷达发出激光束,激光束碰到障碍物后被反射回来,被激光接收系统进行接收和处理,从而得知激光从发射至被反射回来并接收之间的时间,即激光的飞行时间,根据飞行时间,可以计算出障碍物的距离。
根据所发射激光信号的不同形式,激光测距方法有脉冲测距法、干涉测距法和相位测距法等。
(1)脉冲测距法。用脉冲法测量距离时,首先激光器发出一个光脉冲,同时设定的计数器开始计数,当接收系统接收到经过障碍物反射回来的光脉冲时停止计数。计数器所记录的时间就是光脉冲从发射到接收所用的时间。光速是一个固定值,所以只要得到发射到接收所用的时间就可以算出所要测量的距离,如图2-35所示。
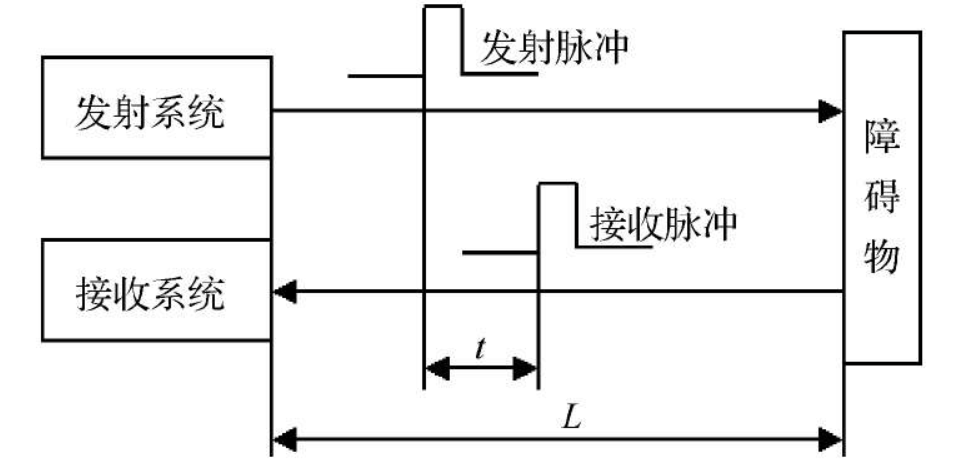
设c为光在空气中传播的速度,c=3×108 m/s,光脉冲从发射到接收的时间为t,则待测距离为L=ct/2。脉冲式激光测距所测得距离比较远,发射功率较高,一般从几瓦到几十瓦不等,最大射程可达几十千米。脉冲激光测距的关键之一是对激光飞行时间的精确测量。激光脉冲测量的精度和分辨率与发射信号带宽或处理后的脉冲宽度有关,脉冲越窄,性能越好。
(2)干涉测距法。干涉测距法的基本原理是利用光波的干涉特性而实现距离测量的方法。根据干涉原理,产生干涉现象的条件是两列有相同频率、相同振动方向的光相互叠加,并且这两列光的相位差固定。
干涉法激光的测距原理如图2-36所示,通过激光器发射出一束激光,通过分光镜分为两束相干光波,两束光波各自经过反射镜M1和M2反射回来,在分光镜处又汇合到一起。由于两束光波的路程差不同,通过干涉后形成的明暗条纹也不同,所以传感器将干涉条纹转换为电信号之后,就可以实现测距。
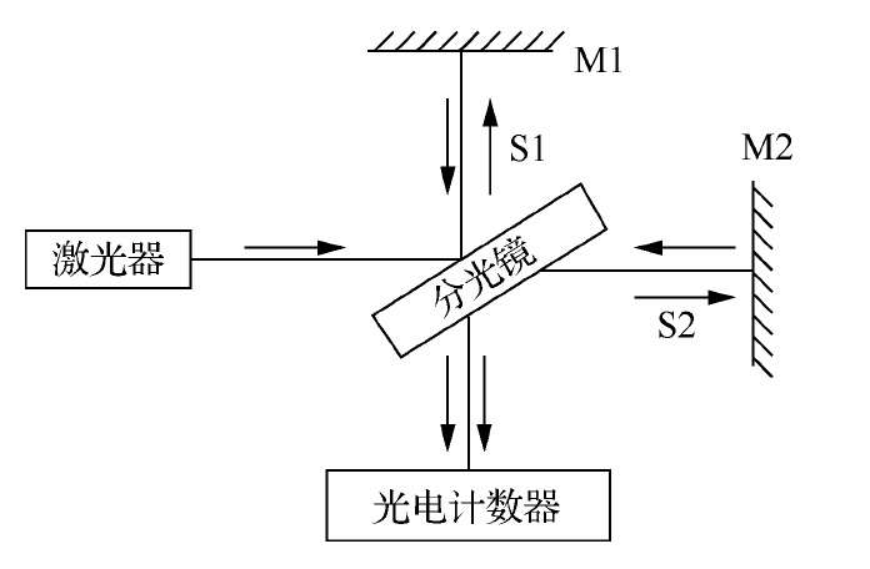
干涉法测距技术虽然已经很成熟,并且测量精度也很好,但是它一般是用在测量距离的变化中,不能直接用它测量距离,所以干涉测距一般应用于干涉仪、测振仪、陀螺仪中。
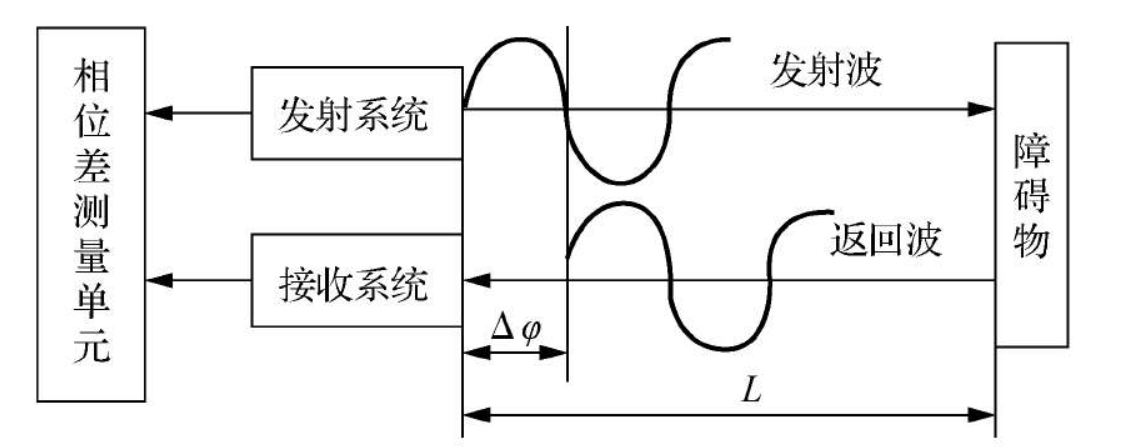
(3)相位测距法。相位法激光的测距原理是利用发射波和返回波之间所形成的相位差来测量距离的。首先,经过调制的频率通过发射系统发出一个正弦波的光束,然后,通过接收系统接收经过障碍物之后反射回来的激光。只要求出这两束光波之间的相位差,便可通过此相位差计算出待测距离。相位法激光的测距原理如图2-37所示。
激光从发射到接收的时间为

式中,t为激光从发射到接收的时间;Δφ为发射波和返回波之间的相位差;ω为正弦波角频率;f为正弦波频率。待测距离为

相位测距法由于其精度高、体积小、结构简单、昼夜可用的优点,被公认为是最有发展潜力的距离测量技术。相比于其他类型的测距方法,相位测距法是朝着小型化、高稳定性、方便与其他仪器集成的方向发展。
5. 激光雷达的类型
激光雷达按有无机械旋转部件,可分为机械激光雷达、固态激光雷达和混合固态激光雷达。
(1)机械激光雷达。机械激光雷达带有控制激光发射角度的旋转部件,体积较大,价格昂贵,测量精度相对较高,一般置于汽车顶部。
图2-38所示为激光雷达厂商威力登(Velodyne)的HDL-64E机械激光雷达,它采用64线束激光规格,性能出众,能够描绘出周围空间的3D形态,精度极高,甚至能够探测出百米内人类的细微动作。

HDL-64E机械激光雷达已经在谷歌、百度等公司生产的无人驾驶汽车上使用。HDL-64E机械激光雷达的缺点是体积大,装配复杂,成本高,机械旋转部件在行车环境下的可靠性不高,难以符合车规的严苛要求。
(2)固态激光雷达。固态激光雷达则依靠电子部件来控制激光发射角度,无须机械旋转部件,故尺寸较小,可安装于车体内。
图2-39所示为激光雷达公司Quanergy在2016年发布的号称全球首款的固态激光雷达S3,它采用了相控阵技术,不含任何旋转活动部件,实现了小型化,并提高了可靠性。在效果上,S3可以达到厘米级精度,30Hz扫描频率,0.1°的角分辨率,以及不同天气条件下的高稳定性,这些特性比起一般的激光雷达,更具竞争力。虽然只有8线,但是每秒扫描接近0.5个百万点,产生50万点的点云数据量,就是横向扫描的时候,横向的角度分辨率非常高。

为了降低激光雷达的成本,也为了提高可靠性,满足车规的要求,激光雷达的发展方向是从机械激光雷达转向固态激光雷达。
(3)混合固态激光雷达。混合固态激光雷达没有大体积旋转结构,采用固定激光光源,通过内部玻璃片旋转的方式改变激光光束方向,实现多角度检测的需要,并且采用嵌入式安装。
根据线束数量的多少,激光雷达又可分为单线束激光雷达与多线束激光雷达。
(1)单线束激光雷达。单线束激光雷达扫描一次只产生一条扫描线,其所获得的数据为2D数据,因此无法区别有关目标物体的3D信息。不过,由于单线束激光雷达具有测量速度快、数据处理量少等特点,多被应用于安全防护、地形测绘等领域。
单线束激光雷达成本低,只能测量距离。北汽福田自动驾驶汽车就使用了4个单线束激光雷达,分别布置于车辆的前后左右,用于车身周围障碍物的检测,如图2-40所示。

2)多线束激光雷达。多线束激光雷达扫描一次可产生多条扫描线,目前市场上多线束激光雷达产品包括4线束、8线束、16线束、32线束、64线束等,其细分可分为2.5D激光雷达及3D激光雷达。2.5D激光雷达与3D激光雷达最大的区别在于激光雷达垂直视野的范围,前者垂直视野范围一般不超过10°,而后者可达到30°甚至40°以上,这也就导致两者对于激光雷达在汽车上的安装位置要求有所不同。
奥迪A8为了实现L3级别的自动驾驶,在汽车的进气格栅下布置了4线束激光雷达,如图2-41所示。4线束激光雷达将4个激光发射器进行轮巡,一个轮巡周期后,得到一帧的激光点云数据。4条点云数据可以组成面状信息,这样就能够获取障碍物的高度信息;根据单帧的点云坐标,可得到障碍物的距离信息;根据多帧的点云的坐标,对距离信息做微分处理,可得到障碍物的速度信息。
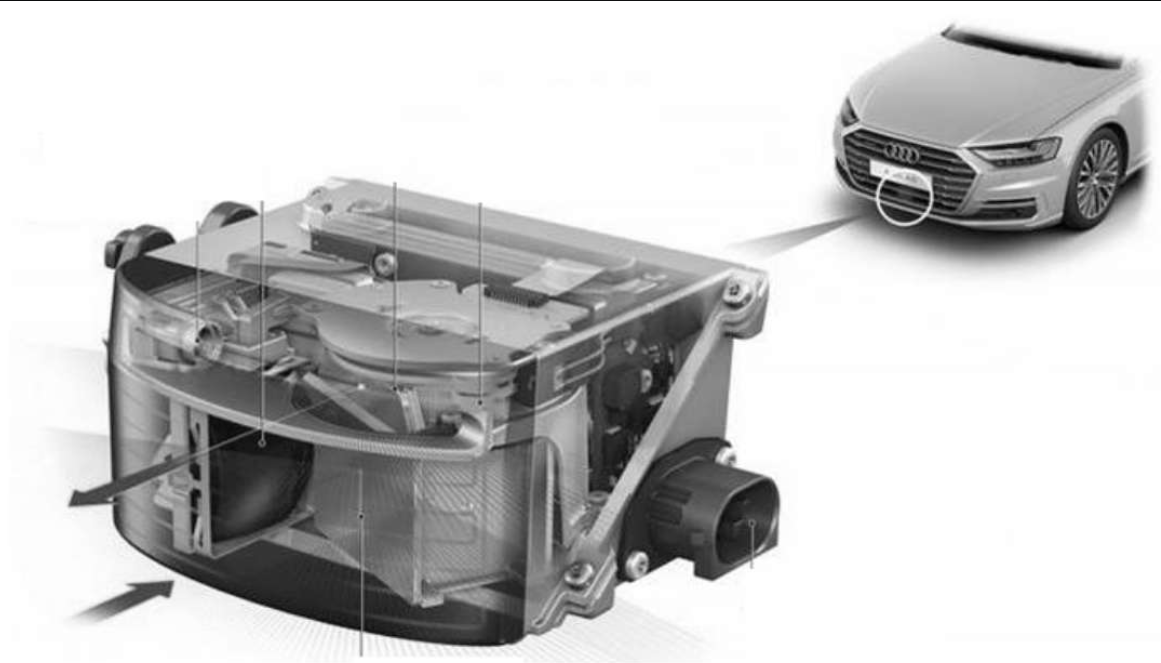
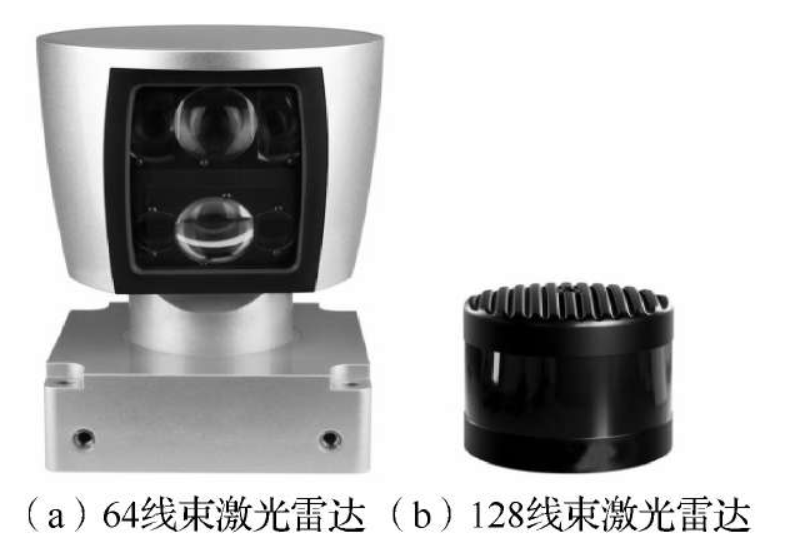
图2-42所示为64线束、32线束和16线束的激光雷达。

美国威力登(Velodyne)公司开发的128线束激光雷达的探测距离约是HDL-64E的3倍,达到300m,分辨率则是10倍,尺寸缩小了70%。该产品是为L5级别自动驾驶而开发的,如图2-43所示。
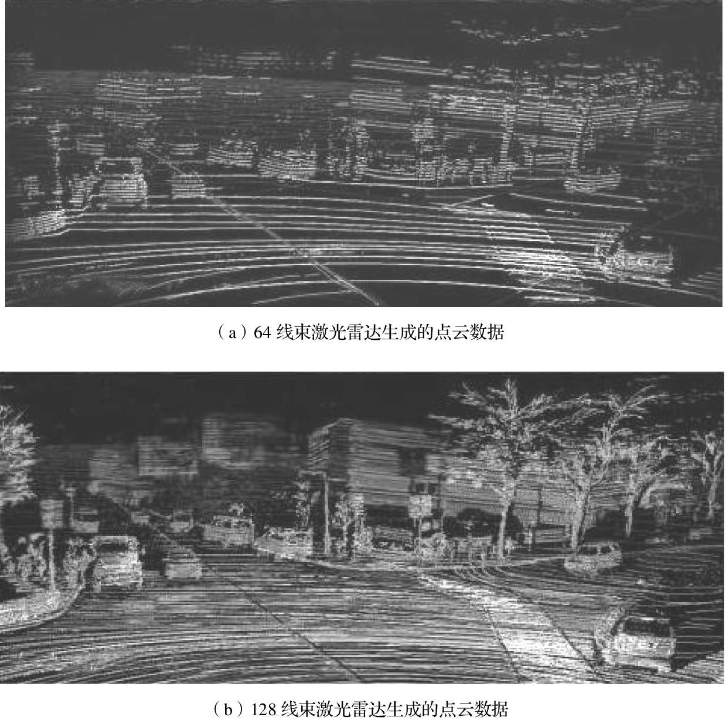
64线束激光雷达和128线束激光雷达生成的点云数据对比如图2-44所示。可以看出,128线束激光雷达生成的点云数据明显清晰。
6. 激光雷达的主要指标
激光雷达主要指标有距离分辨率、最大探测距离、测距精度、测量帧频、数据采样率、角度分辨率、视场角、波长等。
(1)距离分辨率。距离分辨率是指两个目标物体可区分的最小距离。
(2)最大探测距离。最大探测距离通常需要标注基于某一个反射率下的测得值,例如白色反射体大概70%反射率,黑色物体7%~20%反射率。
(3)测距精度。测距精度是指对同一目标进行重复测量得到的距离值之间的误差范围。
(4)测量帧频。测量帧频与摄像头的帧频概念相同,激光雷达成像刷新帧频会影响激光雷达的响应速度,刷新率越高,响应速度越快。
(5)数据采样率。数据采样率是指每秒输出的数据点数,等于帧率乘以单幅图像的点云数目,通常数据采样率会影响成像的分辨率,特别是在远距离,点云越密集,目标呈现就越精细。
(6)角度分辨率。角度分辨率是指扫描的角度分辨率,等于视场角除以该方向所采集的点云数目,因此本参数与数据采样率直接相关。
(7)视场角。视场角又分为垂直视场角和水平视场角,是激光雷达的成像范围。
(8)波长。激光雷达所采用的激光波长,波长会影响雷达的环境适应性和对人眼的安全性。
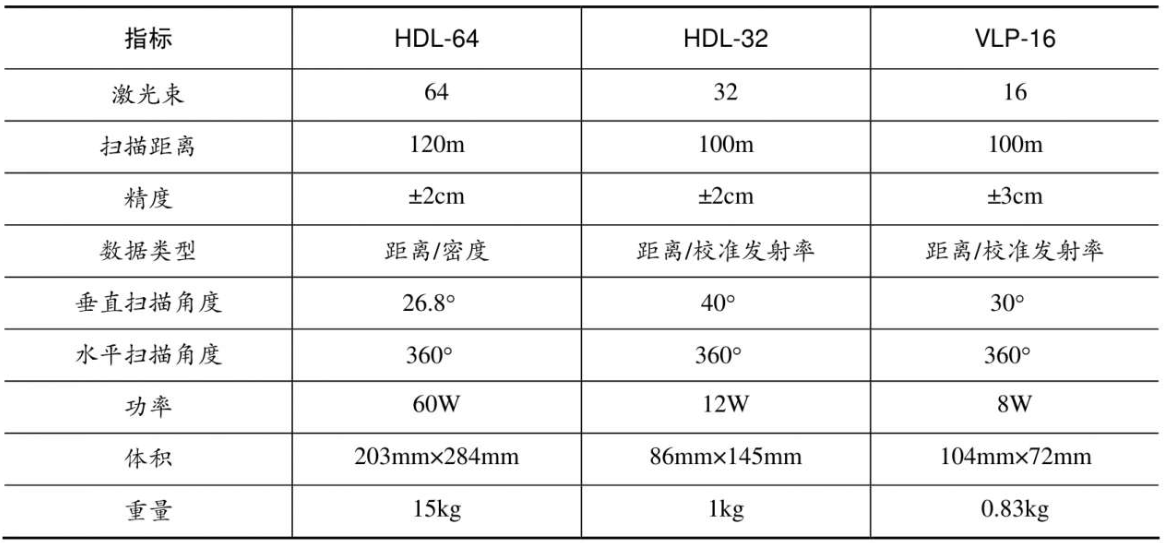
美国威力登(Velodyne)公司生产的激光雷达HDL-64、HDL-32和VLP-16,其主要指标见表2-6。
7. 激光雷达的应用
少线束激光雷达和多线束激光雷达的用途不一样。
IBEO LUX(4线束)激光雷达是德国IBEO公司借助高分辨率激光测量技术,推出的第一款多功能的汽车智能传感器,如图2-45所示。它拥有110°的宽视角,0.3~200m的探测距离,绝对安全的1等级激光。

LUX(4线束)激光雷达不仅输出原始扫描数据,同时输出每个测量对象的数据,如位置、尺寸、纵向速度、横向速度等,拥有远距离、智能分辨率、全天候等能力,结合110°的宽视角,在以下7个方面拥有出色的性能。
(1)行人保护。当行人出现在车辆行驶的前方路面上,需要车辆提供保护的场合。LUX(4线束)激光雷达能检测0.3~30m视场范围内所有的行人。通过分析对象的外形、速度和腿部移动来区分行人与普通物体,传感器在启动安全保护措施(如安全气囊)前300ms时发出警告,这样便可在发生碰撞之前保护行人。
(2)自适应巡航控制系统的启和停。基于LUX(4线束)激光雷达的自适应巡航控制系统可在0~200km/h的速度范围内实现自动行驶,可在没有驾驶员帮助的情况下自动调整车速,如有必要,制动停行。宽视场范围使得它能及时地检测到并线的车辆,并且快速判断它的横向速度。
(3)车道偏离预警。LUX(4线束)激光雷达可以检测车辆行驶前方的车道线标识和潜在的障碍,同时也可以计算车辆在道路中的位置。如果车辆可能会偏离航线,系统会立即发出预警。
(4)自动紧急制动。LUX(4线束)激光雷达实时检测车辆行驶前方的所有静止的和移动的物体,并且判断它们的外形,当要发生危险时,自动紧急制动。
(5)预碰撞处理。通过分析所有的环境扫描数据,不管即将发生什么样的碰撞(如擦碰),预碰撞功能会在碰撞发生前100ms发出警告。LUX(4线束)激光雷达能计算出碰撞的初始接触点并且采取措施以减小碰撞,提前启动安全系统。
(6)交通拥堵辅助。针对城市拥堵路况,LUX(4线束)激光雷达能够在上下班路上消除频繁启停而带来的烦恼。驾驶员只需掌握好汽车转向盘,该功能在时速小于30km/h的路况下显得尤为重要。缓和的加、减速度和可靠的行人保护功能,使车辆驾驶既安全又省心。
(7)低速防碰撞功能。行驶途中,哪怕驾驶员分神一秒也有可能导致事故的发生,引入低速防碰撞功能,使得以前在30km/h时速下时常发生的类似事故不再发生,LUX(4线束)激光雷达检测并分析前方的路况,车辆会在发生碰撞前自动停驶。
对于多线束激光雷达,具有高精度电子地图和定位、障碍物检测与识别、可通行空间检测、障碍物轨迹预测等功能。
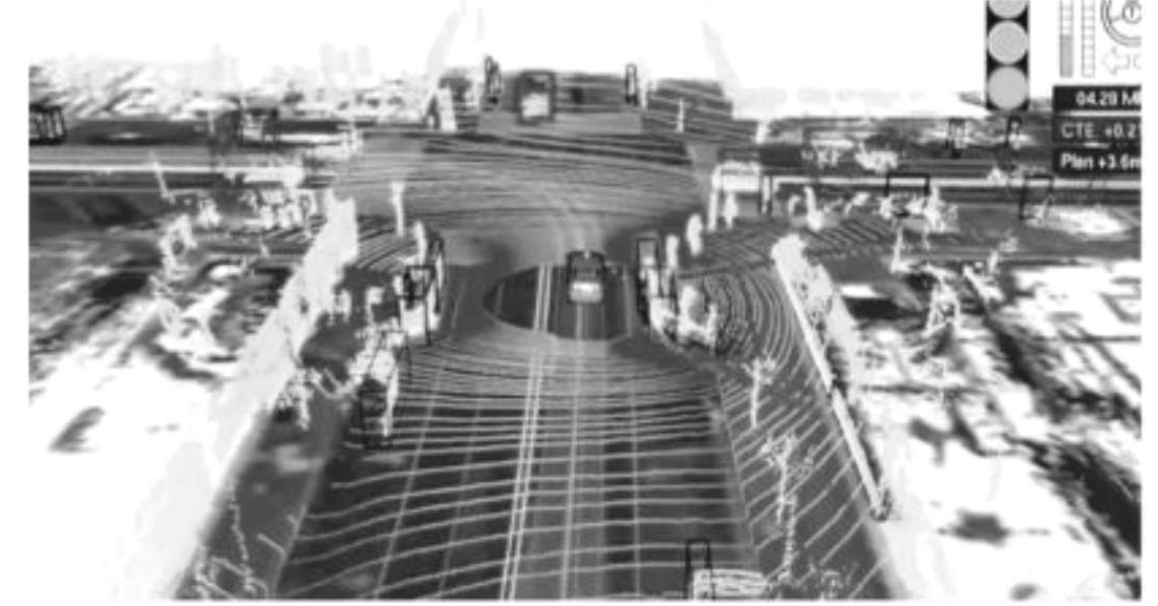
(1)高精度电子地图和定位。利用多线束激光雷达的点云信息与车载组合惯导采集的信息,进行高精度电子地图制作。无人驾驶汽车利用激光点云信息与高精度电子地图匹配,以此实现高精度定位,如图2-46所示。

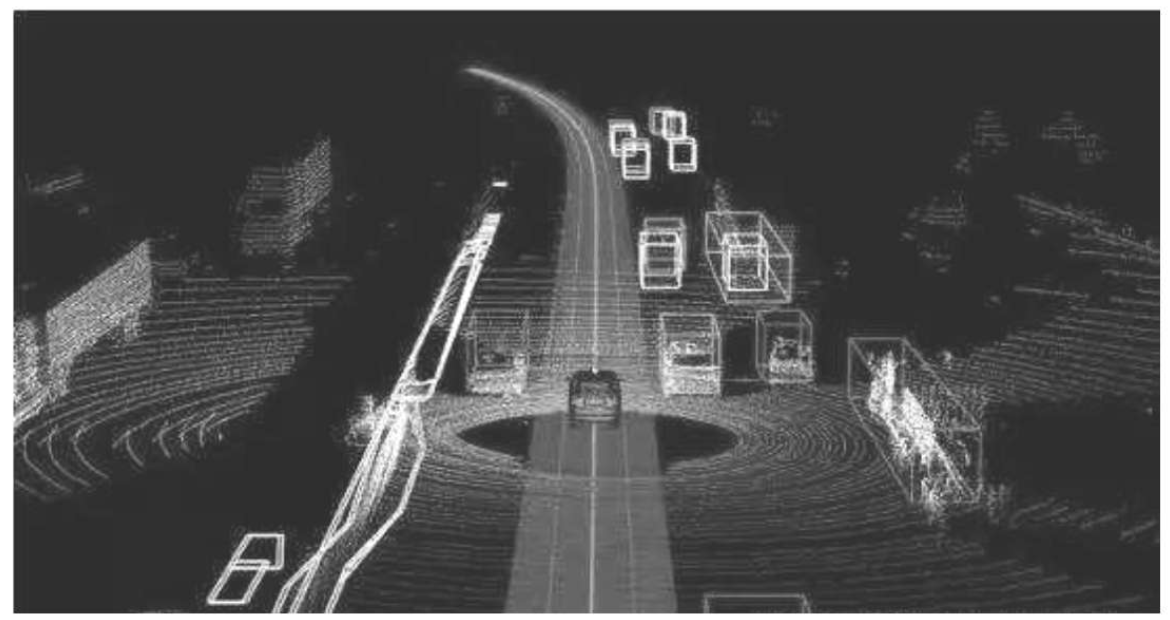
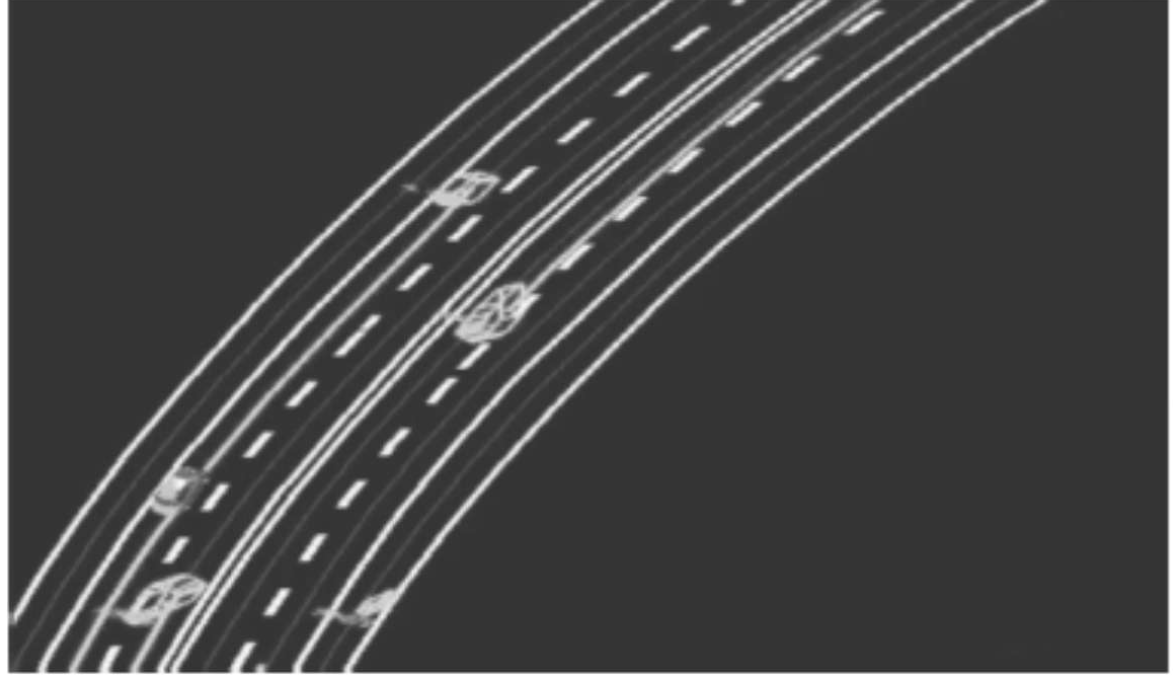
(2)障碍物检测与识别。利用高精度电子地图限定感兴趣区域,根据障碍物特征和识别算法,对障碍物检测与识别,如图2-47所示。
(3)可通行空间检测。利用高精度电子地图限定感兴趣区域,可以对感兴趣区域内部(比如可行驶道路和交叉口)的点云的高度及连续性信息进行判断点云处是否可通行,如图2-48所示。
(4)障碍物轨迹预测。根据激光雷达的感知数据与障碍物所在车道的拓扑关系(道路连接关系)进行障碍物的轨迹预测,以此作为无人驾驶汽车规划(避障、换道、超车等)的判断依据,如图2-49所示。
车载激光雷达产品研发及生产厂商主要集中在国外厂商,美国威力登(Velodyne)公司激光雷达技术研发及产业化进程相对领先,拥有包括HDL-64E、HDL-32E和VLP-163个系列在内的多条产品线;美国德尔福公司、德国博世公司、大陆公司和英飞凌公司等技术竞争实力相对较强,在不同产品领域均占据一定份额。
说明
文章内容来源于《智能网联汽车概述》