1. 毫米波雷达的定义
毫米波雷达是工作在毫米波频段的雷达,如图2-21所示。毫米波是指长度为1~10mm的电磁波,对应的频率范围为30~300GHz。毫米波雷达是ADAS核心传感器,主要用于自适应巡航控制系统、自动制动辅助系统、盲区监测系统、行人检测等。

毫米波与红外波和微波的区别
- 毫米波位于微波与远红外波相交叠的波长范围,所以毫米波兼有这两种波谱的优点,同时也有自己独特的性质。
- 根据波的传播理论,频率越高,波长越短,分辨率越高,穿透能力越强,但在传播过程的损耗也越大,传输距离越短;
- 相对地,频率越低,波长越长,绕射能力越强,传输距离越远。
- 所以与微波相比,毫米波的分辨率高,指向性好,抗干扰能力强,探测性能好。
- 波长短,频率高,分辨率高,穿透力强,功耗大,传输距离短
- 与红外波相比,毫米波的大气衰减小,对烟雾灰尘具有更好的穿透性,受天气影响小。
- 因为毫米波波长较长,绕射能力强,传输距离远
2. 毫米波雷达的特点
毫米波雷达具有以下优点
(1)探测距离远。毫米波雷达探测距离远,可达200m以上。
(2)探测性能好。毫米波波长较短,汽车在行驶中的前方目标一般都是金属构成,这会形成很强的电磁反射,其探测不受颜色与温度的影响。
(3)响应速度快。毫米波的传播速度与光速一样,并且其调制简单,配合高速信号处理系统,可以快速地测量出目标的距离、速度、角度等信息。
(4)适应能力强。毫米波具有很强的穿透能力,在雨、雪、大雾等恶劣天气依然可以正常工作,而且不受颜色和温度的影响。
(5)抗干扰能力强。毫米波雷达一般工作在高频段,而周围的噪声和干扰处于中低频区,基本上不会影响毫米波雷达的正常运行,因此,毫米波雷达具有抗低频干扰的特性。
毫米波雷达具有以下缺点
(1)覆盖区域呈扇形,有盲点区域。
(2)无法识别交通标志。
(3)无法识别交通信号。
3. 毫米波雷达的类型
毫米波雷达可以按照工作原理、探测距离和频段进行分类。
(1)按工作原理分类。毫米波雷达按工作原理的不同可以分为脉冲式毫米波雷达与调频式连续毫米波雷达两类。脉冲式毫米波雷达通过发射脉冲信号与接收脉冲信号之间的时间差来计算目标距离;调频式连续毫米波雷达是利用多普勒效应测量得出不同距离的目标的速度。脉冲式毫米波雷达测量原理简单,但由于受技术、元器件等方面的影响,实际应用中很难实现;目前,大多数车载毫米波雷达都采用调频式连续毫米波雷达。
(2)按探测距离分类。毫米波雷达按探测距离可分为短程(SRR)、中程(MRR)和远程(LRR)毫米波雷达。短程毫米波雷达一般探测距离小于60m;中程毫米波雷达一般探测距离为100m左右;远程毫米波雷达探测距离一般大于200m。
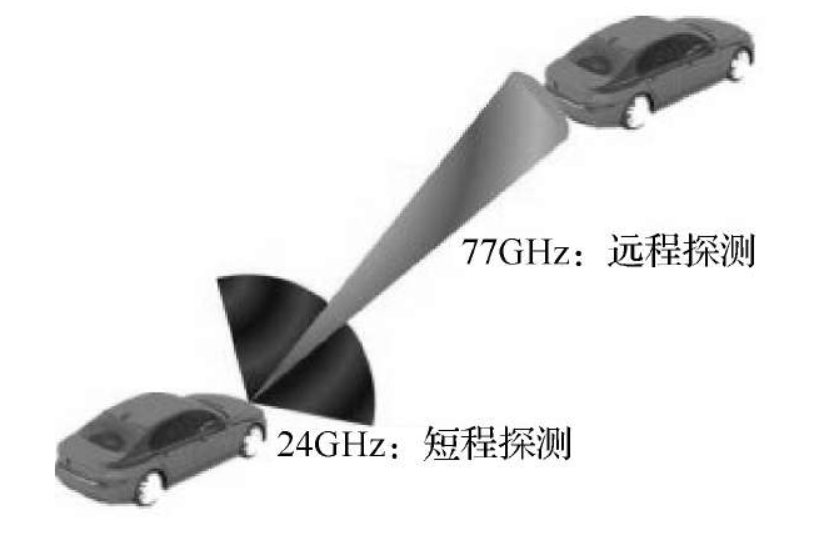
(3)按频段分类。毫米波雷达按采用的毫米波频段不同,划分有24GHz、60GHz、77GHz和79GHz毫米波雷达。主流可用频段为24GHz和77GHz,其中24GHz适合近距离探测,77GHz适合远距离探测,如图2-22所示。79GHz有可能是未来发展趋势。
77GHz毫米波雷达与24GHz毫米波雷达相比具有以下不同。
(1)77GHz毫米波雷达探测距离更远。
(2)77GHz毫米波雷达的体积更小。
(3)77GHz毫米波雷达所需要的工艺更高。
(4)77GHz毫米波雷达的检测精度更好。
(5)77GHz毫米波雷达的射频芯片不容易获取。
4. 毫米波雷达的测量原理
毫米波雷达根据测量原理不同,一般分为脉冲式毫米波雷达和调频式连续毫米波雷达。
(1)脉冲式毫米波雷达。脉冲式毫米波雷达测量原理简单,但由于受技术、元器件等方面的影响,实际应用中很难实现。脉冲式毫米波雷达需在很短的时间(一般都是微秒的数量级)内发射大功率的脉冲信号,通过脉冲信号控制雷达发射装置发射出高频信号,因此在硬件结构上比较复杂,成本高。除此之外,在高速路上行驶的车辆,其回波信号难免会受到周围树木、建筑物的影响,使回波信号衰减,从而降低接收系统的灵敏度。同时,如果收发采用同一个天线时,在对回波信号进行放大处理之前,应将其与发射信号进行严格的隔离,否则会因为发射信号的窜入,导致回波信号放大器饱和或损坏。为了避免发射信号窜入接收信号中,需进行隔离技术处理,通常情况下,采用环形器或收发使用不同的天线以避免发射信号的窜入,但这样就导致硬件结构的复杂性增加,产品成本高。故在车用领域,脉冲式毫米波雷达应用较少。
(2)调频式连续毫米波雷达。目前,车载毫米波雷达主要采用调频式连续毫米波雷达。
调频式连续毫米波雷达是利用多普勒效应测量得出目标的距离和速度,它通过发射源向给定目标发射微波信号,并分析发射信号频率和反射信号频率之间的差值,精确测量出目标相对于毫米波雷达的运动速度等信息。雷达调频器通过天线发射微波信号,发射信号遇到目标后,经目标的反射会产生回波信号,发射信号与回波信号相比形状相同,时间上存在差值;当目标与毫米波雷达信号发射源之间存在相对运行时,发射信号与回波信号之间除存在时间差外,还会产生多普勒频率,如图2-23所示。
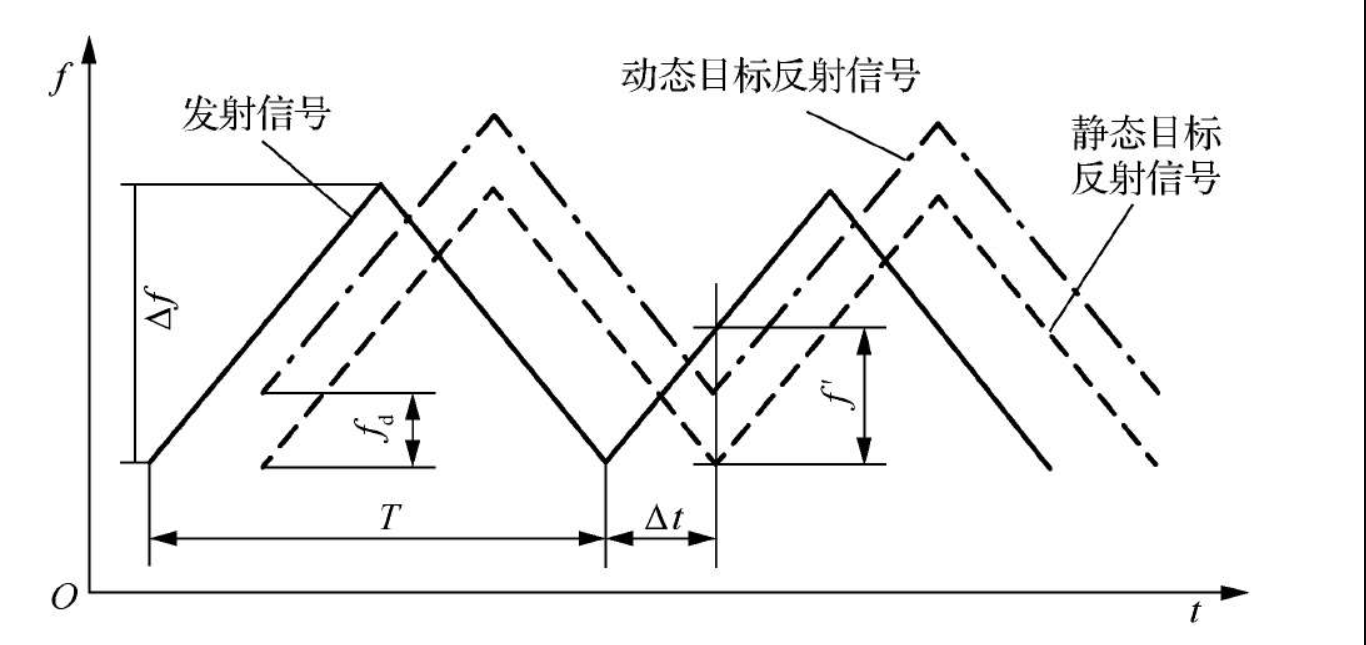
毫米波雷达测量的距离和速度分别为

式中,s为相对距离;c为光速;Δt为发射信号与回波信号的时间间隔;T为信号发射周期;f′为发射信号与反射信号的频率差;Δf为调频带宽;fd为多普勒频率;f0为发射信号的中心频率;u为相对速度。
5. 毫米波雷达的工作过程
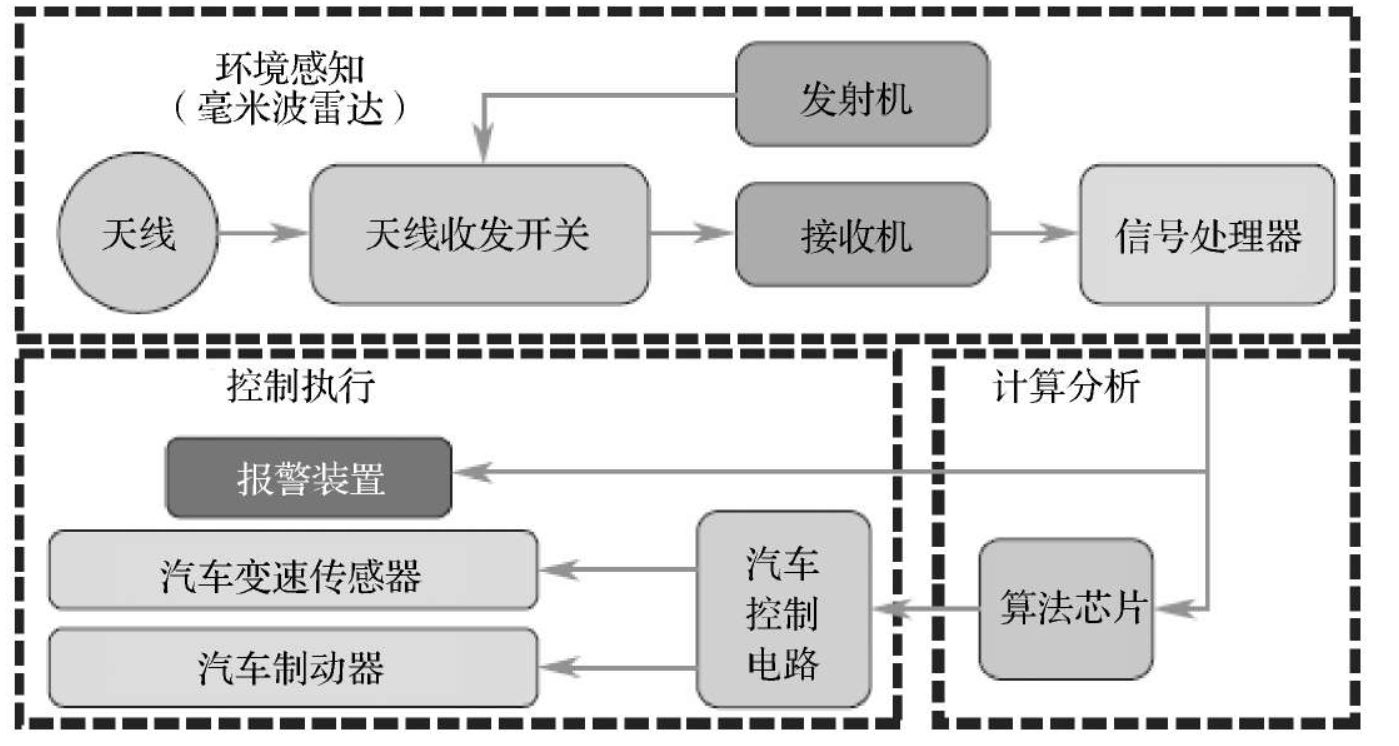
毫米波雷达的工作过程如图2-24所示,它是通过天线向外发射毫米波,接收机接收目标反射信号,经信号处理器处理后快速准确地获取汽车周围的环境信息,如汽车与其他物体之间的相对距离、相对速度、角度、运动方向等,然后根据所探知的物体信息进行目标追踪和识别,进而结合车身动态信息进行数据融合,最终通过中央处理单元(ECU)进行智能处理。经合理决策后,以声、光及触觉等多种方式告知或警告驾驶员,或及时对汽车做出主动干预,从而保证汽车行驶的安全性和舒适性,减少事故发生率。
6. 毫米波雷达的布置
毫米波雷达在智能网联汽车上的布置如图2-25所示,它分为正向毫米波雷达布置、侧向毫米波雷达布置和毫米波雷达布置高度。
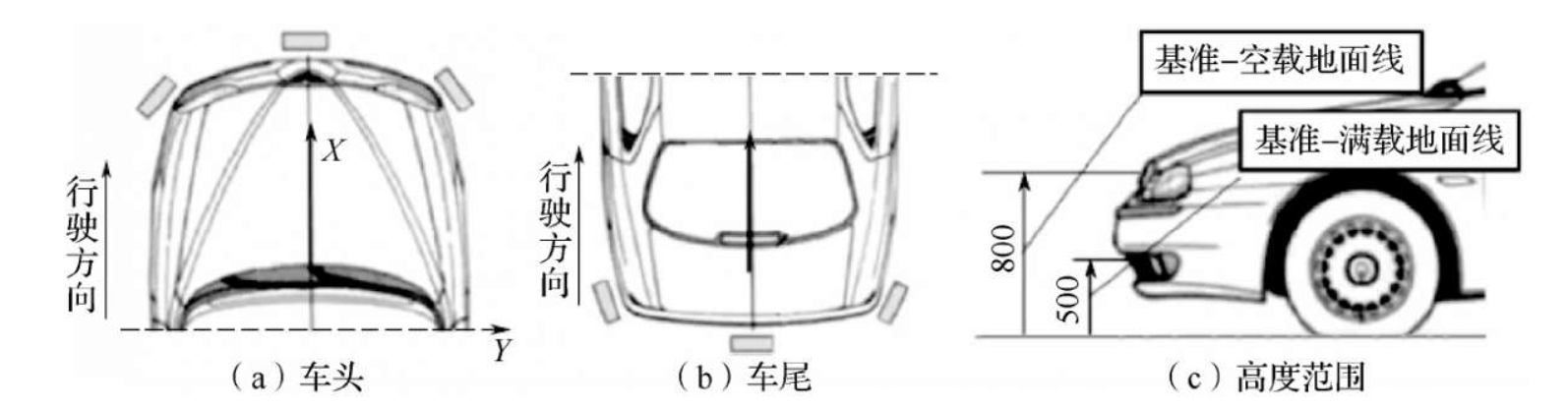
(1)正向毫米波雷达布置。正向毫米波雷达一般布置在车辆中轴线上,外露或隐藏在保险杠内部。雷达波束的中心平面要求与路面基本平行,考虑雷达系统误差、结构安装误差、车辆载荷变化后,需保证与路面夹角的最大偏差不超过5°。另外,在某些特殊情况下,正向毫米波雷达无法布置在车辆中轴线上时,允许正Y向最大偏置距离为300mm,偏置距离过大会影响雷达的有效探测范围。
(2)侧向毫米波雷达布置。侧向毫米波雷达在车辆四角呈左右对称布置,前侧向毫米波雷达与车辆行驶方向成45°夹角,后侧向毫米波雷达与车辆行驶方向成30°夹角,雷达波束的中心平面与路面基本平行,角度最大偏差仍需控制在5°以内。
(3)毫米波雷达布置高度。毫米波雷达在垂直方向探测角度一般只有±5°,雷达安装高度太高会导致下盲区增大,太低又会导致雷达波束射向地面,地面反射带来杂波干扰,影响雷达的判断。因此,毫米波雷达的布置高度(即地面到雷达模块中心点的距离),一般建议为500(满载状态)~800mm(空载状态)。
毫米波雷达在布置时,还需要兼顾考虑其他因素,如雷达区域外造型的美观性,对行人保护的影响,设计安装结构的可行性,雷达调试的便利性,售后维修成本等。
7. 毫米波雷达的主要指标
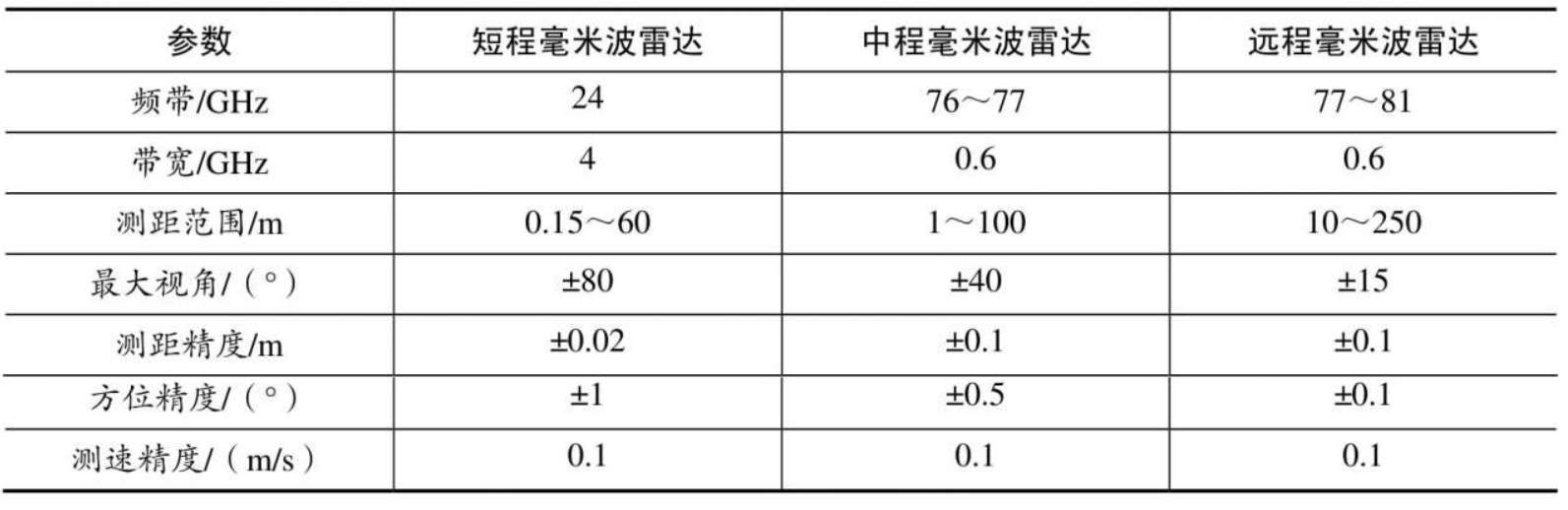
短程、中程和远程毫米波雷达的技术指标见表2-2。
77GHz毫米波雷达的主要指标见表2-3。

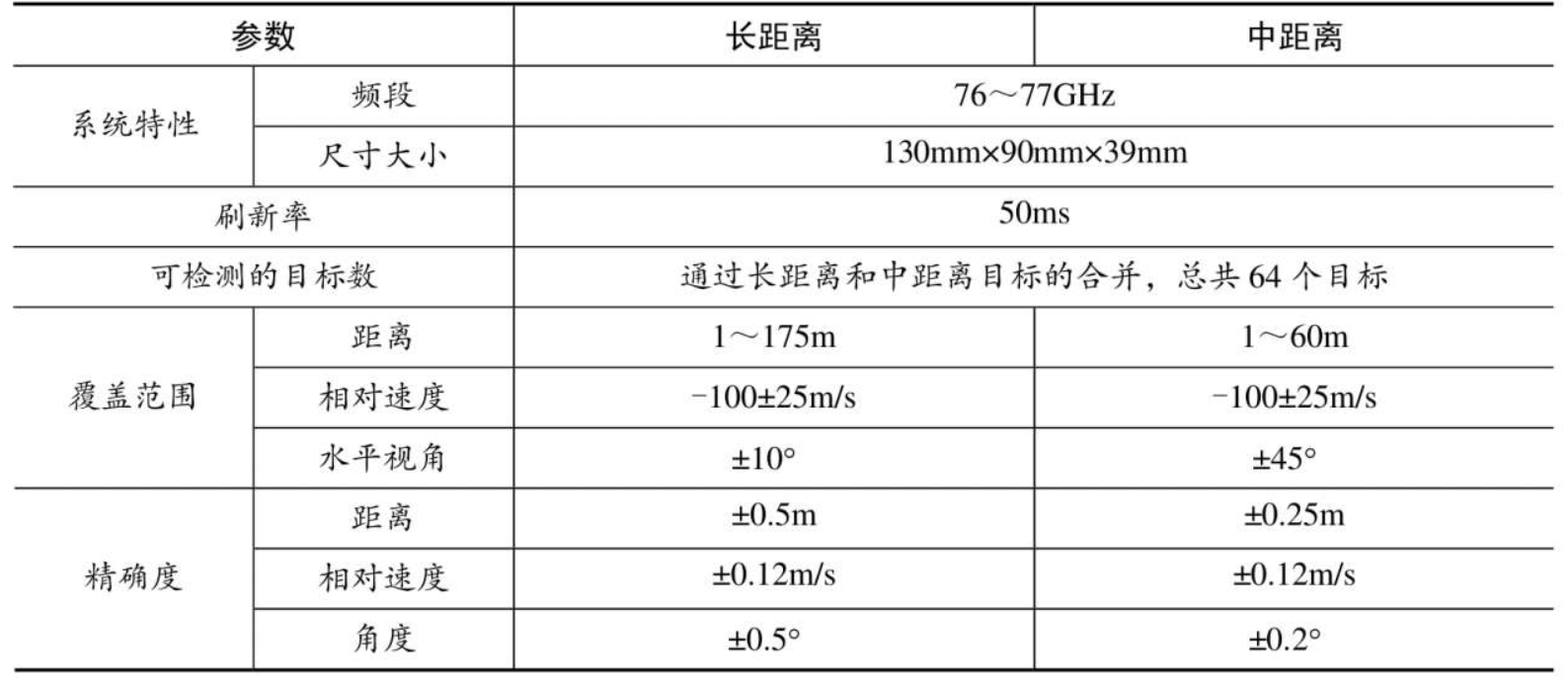
美国德尔福公司开发的ESR高频电子扫描毫米波雷达采用连续调制方式,应用多普勒测试原理,能够扫描最远范围175m以内的64个目标。
ESR毫米波雷达能够提供目标的距离、相对速度和角度等信息。它从CAN总线获取所需的车速、横摆角速度、转向盘转角等自车信息,扫描后将目标的信息,如距离、相对速度等同样通过CAN总线传递给车载计算机。
ESR毫米波雷达同时具有中距离扫描和长距离扫描的功能,并将所扫描的目标数据存入相应的内存地址,其主要指标见表2-4。
不同厂家生产的毫米波雷达的技术指标是不一样的,即使同一厂家生产的毫米波雷达,也会不断进行技术升级,所以表中所列毫米波雷达的技术指标仅供参考,最终应以厂家提供的毫米波雷达技术指标为准。
8. 毫米波雷达的应用
毫米波雷达在智能网联汽车上的应用主要有自适应巡航控制系统、前向碰撞预警系统、自动制动辅助系统、盲区监测系统、自动泊车辅助系统、变道辅助系统等先进驾驶辅助系统(ADAS)。
例如:奔驰S级采用6个毫米波雷达(1个远程+1个中程+4个短程),分别分布在前向双模远程毫米波雷达1个,后向中程毫米波雷达1个,前/后保险杠左右短程毫米波雷达共4个。“短程+中程+远程”毫米波雷达三者结合一起共同完成自适应巡航(ACC)、前向/后向碰撞预警(FCW/BCW)、自动制动辅助(AEB)、盲区监测(BSD)、变道辅助(LCA)、倒车辅助(BPA)、自动泊车辅助(PA)等多种ADAS功能。这些功能是如何实现的?下面将详细介绍。
(1)自适应巡航控制系统。自适应巡航控制(ACC)系统是一种可以依据设定的车速或距离跟随前方车辆行驶,或根据前车速度主动控制本车行驶速度,最终将车辆与前车保持在安全距离的辅助驾驶功能,该功能最大的优点是可以有效地解放驾驶员的双脚,提高驾驶的舒适性,如图2-26所示。

ACC的实现原理:在车辆行驶过程中,安装在车辆前部的毫米波雷达传感器持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC系统可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。ACC系统在控制车辆制动时,通常会将制动减速限制在不影响舒适度的程度,当需要更大的减速时,ACC系统会发出声、光预警信号,通知驾驶员主动采取制动操作
(2)前向碰撞预警系统。前向碰撞预警系统是通过毫米波雷达和前置摄像头不断监测前方的车辆,判断本车与前车之间的距离、方位及相对速度,探测到前方潜在的碰撞危险,当驾驶员没有采取制动措施时,仪表会显示报警信息并伴随声音报警,警告驾驶员务必采取应对措施,如图2-27所示。当判断到事故即将发生时,系统会让制动自动介入工作,从而避免事故发生或降低事故可能造成的风险。

(3)自动制动辅助系统。自动制动辅助(AEB)系统是利用毫米波雷达测出与前车或障碍物的距离,然后利用数据分析模块将测出的距离与警报距离、安全距离进行比较,小于警报距离时就进行警报提示,而小于安全距离时,即使在驾驶员没有来得及踩制动踏板的情况下,该系统也会启动,使汽车自动制动,从而确保驾驶安全,如图2-28所示。
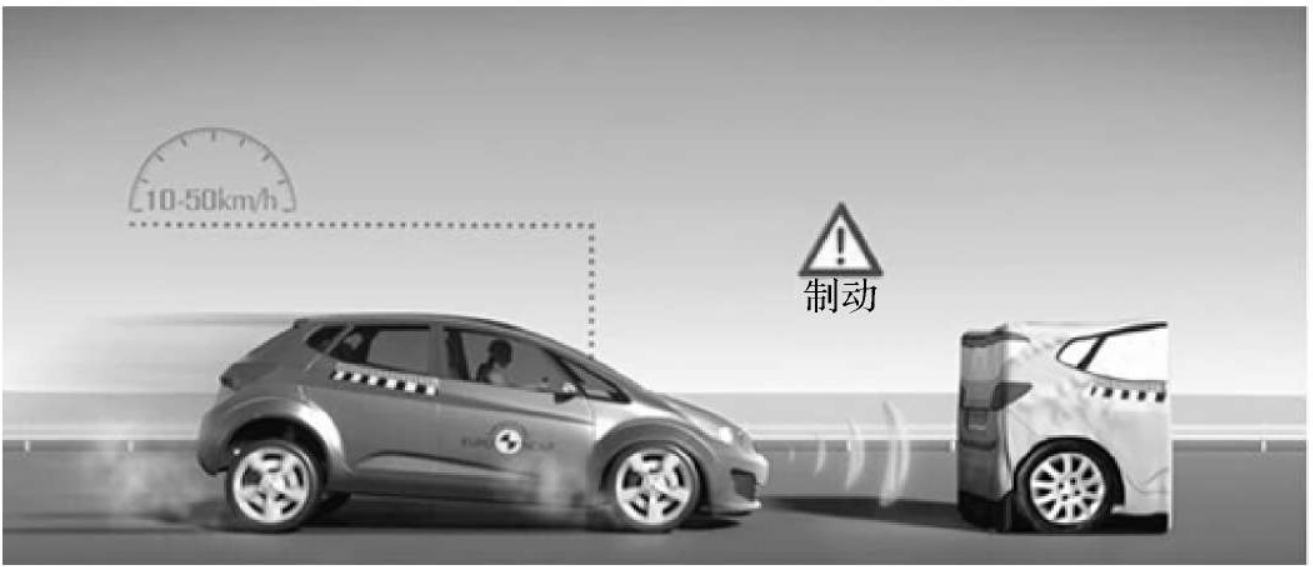
据研究表明,90%的交通事故是由于驾驶员的注意力不集中而引起的,AEB技术能减少38%的追尾碰撞。且无论是在城市道路(限速60km/h)还是郊区道路行驶的情况下,效果都显著。
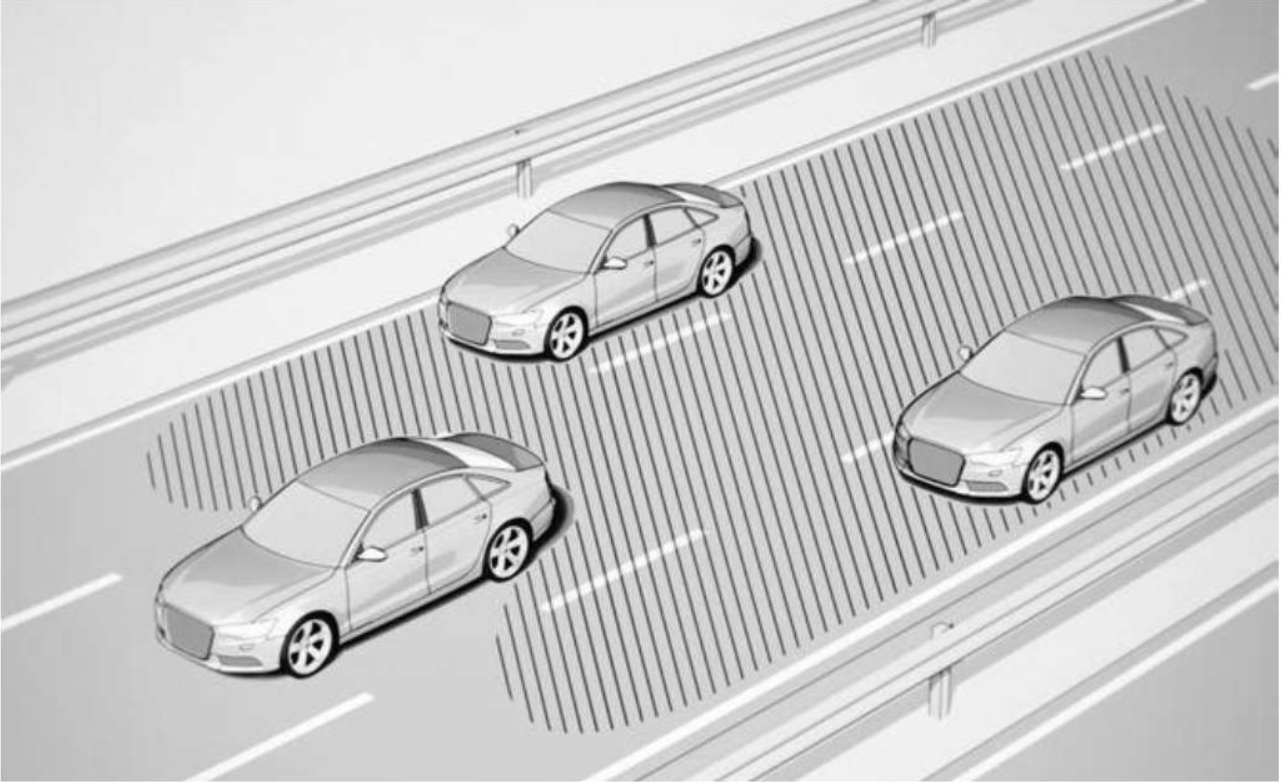
(4)盲区监测系统。盲区监测系统根据毫米波雷达判断移动物体所处的相对位置及与本车的相对速度,当处于本车的盲区范围内,及时提醒驾驶员注意变道出现的风险,如图2-29所示。

(5)自动泊车辅助系统。自动泊车辅助系统是利用毫米波雷达探测环境信息,如寻找可用车位,在泊车过程中实时探测车辆的位置信息和车身状态信息。在车位探测阶段,采集车位的长度和宽度;在泊车阶段,监测汽车相对于目标停车位的位置坐标,进而用于计算车身的角度和转角等信息,确保泊车过程的安全可靠,如图2-30所示。

(6)变道辅助系统。变道辅助系统是通过毫米波雷达、摄像头等传感器,对车辆相邻两侧车道及后方进行探测,获取车辆侧方及后方物体的运动信息,并结合当前车辆的状态进行判断,最终以声、光等方式提醒驾驶员,让驾驶员掌握最佳变道时机,防止变道引发的交通事故,同时对后向碰撞也有比较好的预防作用。
变道辅助系统包括“盲区监测(BSD)”“变道预警(LCA)”“后向碰撞预警(RCW)”3个功能,可以有效地防止变道、转弯、后方追尾等交通事故的发生,极大提升汽车变道操作的安全性能,如图2-31所示。
(7)后向碰撞预警系统。后向碰撞预警系统是指安装在车辆后方的毫米波雷达检测到同一车道后方有快速接近的移动物体,并有碰撞风险时,及时通过声、光等方式,通知驾驶员采取措施,避免发生碰撞或减小碰撞带来的伤害,如图2-32所示

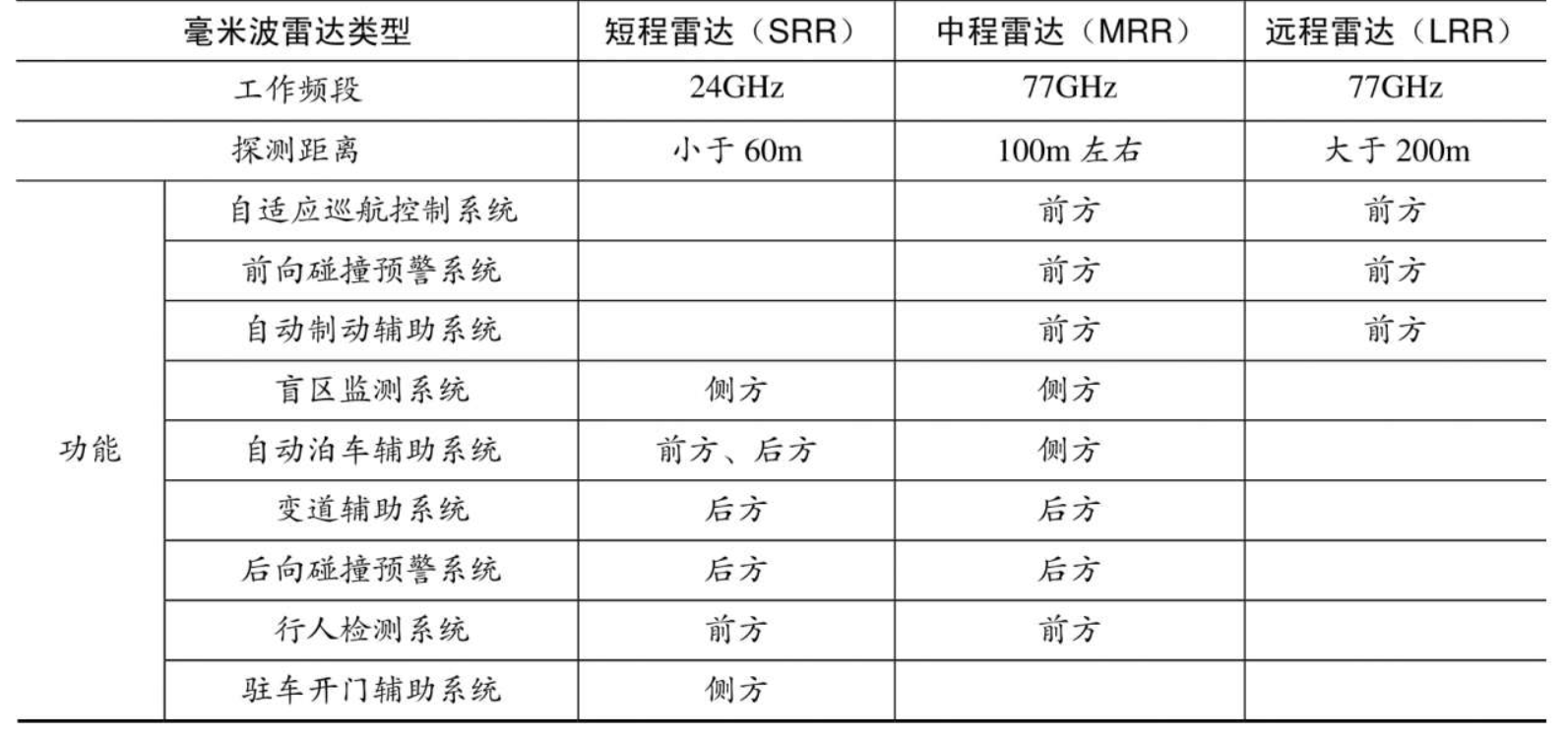
为了满足不同距离范围的探测需要,一辆汽车上会安装多个近距离、中距离和远距离毫米波雷达。其中24GHz毫米波雷达主要实现短程(SRR)探测,77GHz毫米波雷达主要实现中程(MRR)和远程(LRR)的探测。不同的毫米波雷达在车辆前方、侧方和后方发挥不同的作用。
目前,德国的海拉公司、博世公司和法国的法雷奥公司占据我国24GHz毫米波雷达市场60%以上的出货量;德国的大陆公司、博世公司和美国的德尔福公司占据我国77GHz毫米波雷达市场80%以上的出货量;国内企业实现了24GHz毫米波雷达的批量生产;完成了77GHz毫米波雷达的样机测试。
说明
文章内容来源于《智能网联汽车概述》








![[Android开发学iOS系列] ViewController](https://img2022.cnblogs.com/blog/325852/202210/325852-20221011233744274-1266984785.png)